Видео Пятница — это ваша еженедельная подборка потрясающих видеороликов о робототехнике, собранных вашими блогерами из Automaton. Мы также будем публиковать еженедельный календарь предстоящих событий в области робототехники на ближайшие несколько месяцев; вот что у нас есть:
Будь то собака, гоняющаяся за мячом, или обезьяна, качающаяся среди деревьев, животные могут легко выполнить невероятно богатый репертуар ловких навыков передвижения. Но разработка контроллеров, позволяющих роботам на ножках воспроизводить эти гибкие модели поведения, может быть очень сложной задачей. Превосходная ловкость, наблюдаемая у животных, по сравнению с роботами, может привести к удивлению: можем ли мы создавать более гибких роботов-контроллеров с меньшими усилиями, напрямую имитируя животных?
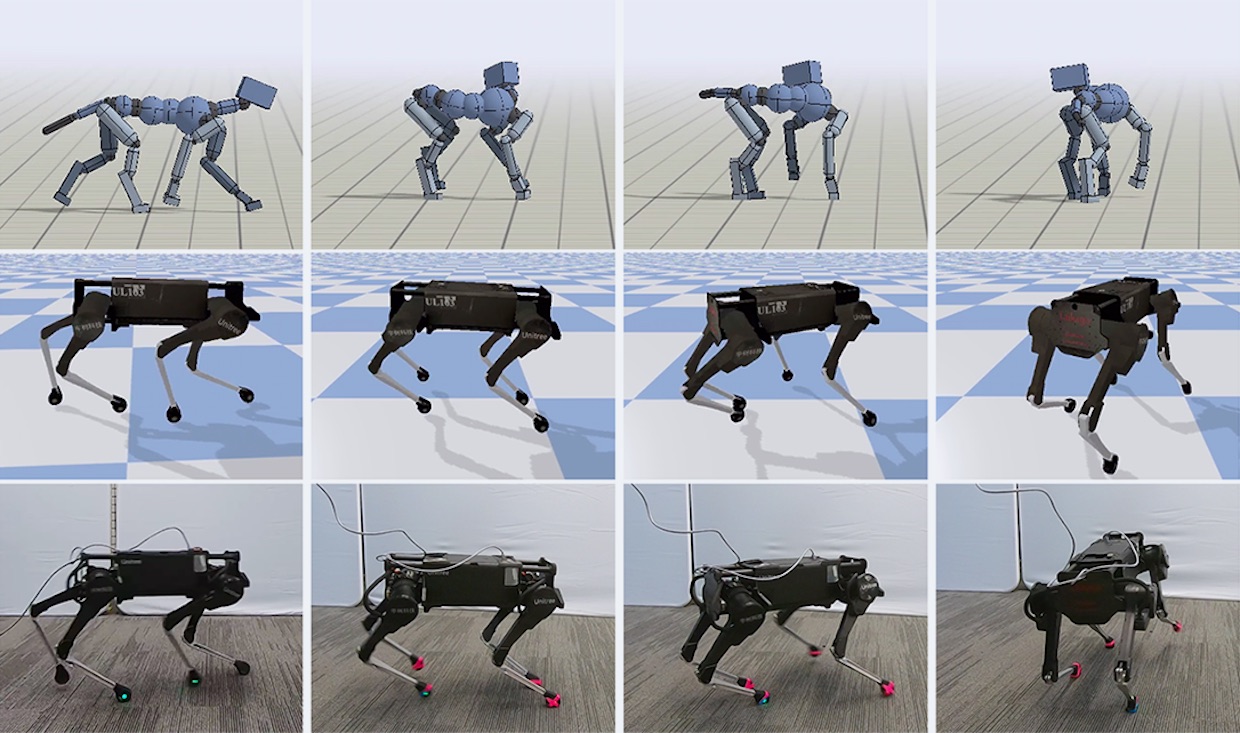
В этой работе мы представляем рамки для обучения навыкам роботизированной локомоции, подражая животным. Учитывая эталонный клип движения, записанный животным (например, собакой), наша структура использует обучение с подкреплением для обучения политике управления, которая позволяет роботу имитировать движение в реальном мире. Затем, просто предоставляя системе различные опорные движения, мы можем обучить четвероногого робота выполнять разнообразные маневренные действия, начиная от быстрых походок и заканчивая динамическими прыжками и поворотами. Политики обучаются в основном для моделирования, а затем переносятся в реальный мир с использованием техники скрытой адаптации к пространству, которая способна эффективно адаптировать политику, используя данные всего лишь нескольких минут от реального робота.
Инженеры из Калифорнийского университета в Сан-Диего разработали новый метод, который не требует специального оборудования и работает в считанные минуты для создания мягких, гибких роботов с 3D-печатью. Инновация исходит из переосмысления способа создания мягких роботов: вместо того, чтобы выяснить, как добавить мягкие материалы к жесткому корпусу робота, исследователи UC San Diego начали с мягкого тела и добавили жесткие характеристики к ключевым компонентам. Структуры были вдохновлены экзоскелетами насекомых, которые имеют как мягкие, так и жесткие части — исследователи назвали свои творения «флексоскелетами».
Работа на дому означает, что это новый нормальный.
В этом видео мы представляем постоянную разработку простой роботизированной системы, которая включает в себя антибактериальную лампу мощностью 60 Вт. Система представляет собой четырехколесный робот-ровер, который самостоятельно управляется и перемещается с помощью датчика LiDAR. Этот экспериментальный план предназначен для изучения возможности использования такой системы для дезинфекции в этот критический период. Основная цель использования УФ-бактерицидной лампы на роботе связана с его способностью позиционировать себя во многих местах, обеспечивая широкий дезинфицирующий охват.
Это развитие сделано с учетом того факта, что во время этого кризиса мы все полагаемся на систему здравоохранения и медицинских работников. Мы видели, что роботы имели такое использование и исследуют соответствующий потенциал. Кроме того, эта разработка была сделана на основе существующего робота нашей лаборатории и в то же время #StayingAtHome в соответствии с официальными рекомендациями. Этот простой тест был единственной точкой, во время которой 2 сотрудника лаборатории должны были быть вместе, чтобы координировать развертывание робота и запись видео. Участники работали, соблюдая правила 2-метровой дистанции и используя СИЗ.
Извините, догго, некоторые вещи, роботы просто лучше.
Используя запатентованные технологии, Aertos 120-UVC может стабильно летать внутри зданий, зараженных вирусом COVID-19, что позволяет людям безопасно находиться вдали от зараженных районов. Промышленные беспилотники Digital Aerolus не используют GPS или внешние датчики, что позволяет им стабильно работать в местах, где другие беспилотники недоступны, включая небольшие и ограниченные пространства. Когда беспилотник летит на высоте 6 футов над поверхностью в течение 5 минут, он обеспечивает скорость дезинфекции более 99% по сравнению с поверхностью размером более 2 х 2 метра.
Таким образом, поверхность размером 2 на 2 метра занимает 5 минут — это длительное время для дронов, поэтому количество поверхностей, которые эта вещь может дезинфицировать, прежде чем она нуждается в перезарядке, должно быть довольно ограничено. Может быть, их рой, хотя?
Новый автономный робот, разработанный инженерами НАСА и испытанный в Антарктике группой исследователей, в том числе инженером из Университета Западной Австралии, предназначен для поездки в космическое пространство и может в будущем искать признаки жизни в океанические миры за пределами Земли.
Роботы могут быть очень полезны для дезинфекции поверхностей с помощью COVID-19, что может быть опасной задачей для людей. В USC Viterbi Center for Advanced Manufacturing мы разработали ADAMMS, робота для выполнения задач по уходу за машиной. Мы модифицируем этого робота для выполнения задач дезинфекции в общественных местах, таких как офисы, лаборатории, школы, отели и общежития. Мы называем это ADAMMS-UV.
ADAMMS-UV — это полуавтономный мобильный манипулятор, использующий палочку ультрафиолетового света, установленную на руке робота, для достижения мест, которые не могут быть обработаны источником ультрафиолета, установленным на мобильной базе. Он может использовать захват, чтобы открывать ящики, шкафы и манипулировать объектами, чтобы выполнить детальную дезинфекцию на труднодоступных поверхностях. ADAMMS-UV управляется удаленным оператором, расположенным далеко от зоны риска.
Подчеркните видео как с систем, так и с виртуальных треков DARPA SubT Urban Circuit.
В средней школе Куньмин № 3 и средней школе Куньмин Дяньчи в провинции Юньнань, к юго-западу от Китая, ученики возвращаются в школу после длительного отсутствия из-за Covid-19, и теперь их встречает робот, а не человек. Робот, названный AIMBOT, измеряет температуру учеников и проверяет их лица на наличие масок, что помогает школьному персоналу повысить эффективность мониторинга и снизить риск перекрестного заражения. Робот AIMBOT может определять температуру людей с точностью до 99 процентов на расстоянии до 3,5 метров с помощью инфракрасной технологии. Они также могут контролировать температуру до 15 человек одновременно.
У EMYS гораздо больше друзей, чем у меня, и я не уверен, как к этому относиться .
В этом видео мы представляем результаты автономной подземной разведки на незаконченной атомной электростанции в Вашингтоне, США, с использованием ЛЮБОГО четвероногого робота.
Мне нужна одна из этих мини-систем упаковки закусок для моей кухни. И мне больше ничего не понадобится для моей кухни.
18-27 февраля 2020 года мы приняли участие в городской трассе подземного испытания @DARPAtv, проходившей на недостроенной Сатсопской атомной электростанции в Вашингтоне, США. Вместе с CTU-CRAS-NORLAB мы заняли 3-е место в общем зачете среди 10 участвующих команд и заняли 1-е место среди команд, не финансируемых DARPA. В этом видео мы показываем различные фрагменты планирования, исследования и картирования пути автономного БПЛА, полученные во время соревнования.
В условиях, когда человечество сталкивается с новыми и все более масштабными проблемами в медицинской и бытовой сферах, автоматизация сектора услуг несет в себе огромный потенциал для повышения эффективности, качества и безопасности операций. В этой работе представлена мобильная система манипулирования, которая объединяет восприятие, локализацию, навигацию, планирование движения и навыки захвата в одном общем рабочем процессе для извлечения и переноса приложений в неструктурированных помещениях.
В этом видео рассказывается о системе разведки и картографии на борту автономного летательного аппарата. Обзор системы представлен в симуляции с использованием сетки пещеры из Западной Вирджинии. Аппаратные результаты демонстрируются в Laurel Caverns, коммерчески принадлежащей и управляемой пещере на юго-западе штата Пенсильвания, США.
Немногие современные методы перцептивного моделирования с высоким разрешением количественно определяют время для передачи модели по каналам связи с низкой пропускной способностью и высокой надежностью, таким как радио. Чтобы восполнить этот пробел в уровне техники, эта работа компактно представляет сенсорные наблюдения в виде моделей гауссовой смеси и поддерживает локальную карту сетки занятости для планировщика движения, которая жадно максимизирует теоретико-информационную целевую функцию. Аппаратные результаты представлены в полной темноте с автономным летательным аппаратом, оборудованным камерой глубины для картографирования, камерой, направленной вниз, для оценки состояния, а также огнями вперед и вниз.
Наша высокопроизводительная система манипуляции представляет собой двухруковую роботизированную систему, которая включает в себя два очень ловких мобильных манипулятора, подвижный торс, который можно установить на различные мобильные платформы, и возможность выполнять задачи с человеческой силой и ловкостью в Разнообразие внутренней и наружной среды.
Если вы являетесь производителем, наращивающим производство критически важных товаров, Robotiq хочет помочь вам развернуть приложение cobot через две недели. Две недели! ПОШЛИ!