Инженеры из Джонса Хопкинса посмотрели на то, как змеи перемещаются, чтобы сообщить дизайн ловкого нового робота. Есть надежда, что разработка может привести к поиску и спасению ботов, способных легко преодолевать любые препятствия.
«Мы обращаемся к этим жутким существам за вдохновением в движении, потому что они уже настолько искусны в том, чтобы стабильно масштабировать препятствия в своей повседневной жизни», — сказал старший автор исследования Чен Ли. «Надеюсь, наш робот научится качаться и плести по поверхности, как змеи».
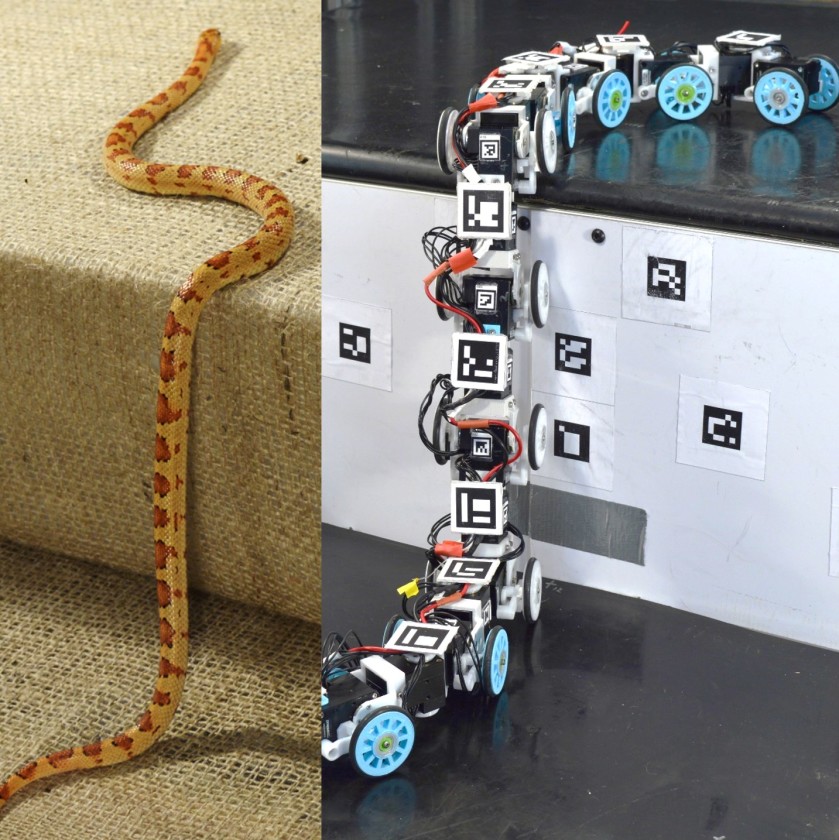
Наблюдая, как переменная королевская змея взбиралась по ступеням разной высоты и имела разные поверхности, исследователи отметили, что змея сочетает в себе боковую волнистость с консольным движением. Столкнувшись с шагом, рептилия, казалось, разделила свое тело на три части: передняя и задняя часть двигались вперед и назад, а средняя часть оставалась неподвижной.
При приближении к ступени длина передней части увеличивается, средняя часть остается примерно такой же, а задняя часть укорачивается. Скорость будет уменьшена, и извилистость будет менее выраженной для более высоких ступеней или ступеней со скользкой поверхностью, чтобы помочь сохранить стабильность.
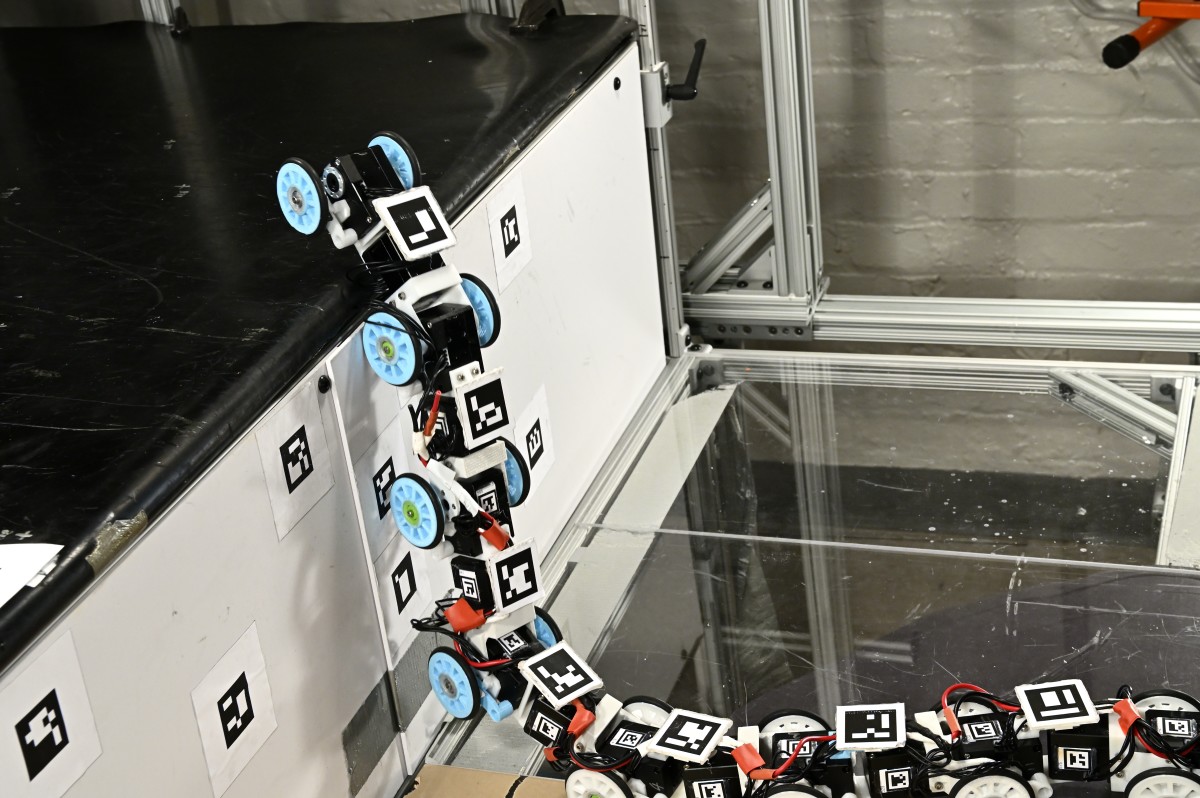
Изучив видеозаписи змей, аспирант Циюань Фу приступил к созданию робота, вдохновленного змеями. В ранней версии 10-сегментного колесного гусеничного устройства возникали проблемы со стабильностью, когда он сталкивался со ступенями, часто переворачиваясь или застревая. Инженеры уменьшили его неустойчивость крена, вставив механизм подвески между каждым колесом в одну сторону и сегментом кузова.
Теперь змей-бот, способный прижиматься к поверхности во время восхождения, мог в значительной степени прибивать ступени «до 38 процентов длины тела».
Команда отмечает, что его робот почти соответствовал скорости животного, которое его вдохновило. Но добавление подвески означает, что для ее работы требуется больше сока, чем для более ранних роботов из других исследований. Инженеры продолжат работу над змеиным ботом с целью сделать его способным преодолевать более сложные препятствия на трехмерной местности.