В IROS в прошлом году, Калифорнийский технологический институт и JPL представил прототип для баллистическим запущенного quadrotor -После сложенной в своего рода футбольной формы с ребрами, беспилотный набивают в трубку , а затем выстрелил прямо со взрывом сжатого CO 2 , в в этой точке он разворачивается, стабилизируется и затем улетает. Прошло около полугода, и прототип был увеличен как по размеру, так и по возможностям, теперь с полдюжиной роторов и полной автономностью на борту, которая может (едва) втиснуться в 6-дюймовую трубу.
SQUID расшифровывается как «Оптимизированный быстро разворачивающийся исследовательский дрон». Первоначальный 3-дюймовый SQUID, о котором мы писали в прошлом году, был понижен в должности до «микро-SQUID», а новый SQUID — это гораздо более мощная 6-дюймовая версия. Вы должны прочитать нашу предыдущую статью о микро-сквидах, чтобы получить некоторую предысторию этой концепции , но в целом дроны с трубчатым запуском уникальны тем, что они устраняют требования к типу конкретных условий взлета, которых ожидает большинство дронов — в неподвижном состоянии, на земле и не близко ни к чему, что возражает против того, чтобы его разрезали на части. Демонстрация в прошлом году показала запуск микро-СКВИДа с движущегося транспортного средства, но общая идея заключается в том, что вы можете запустить СКВИД мгновенно и практически из любого места.
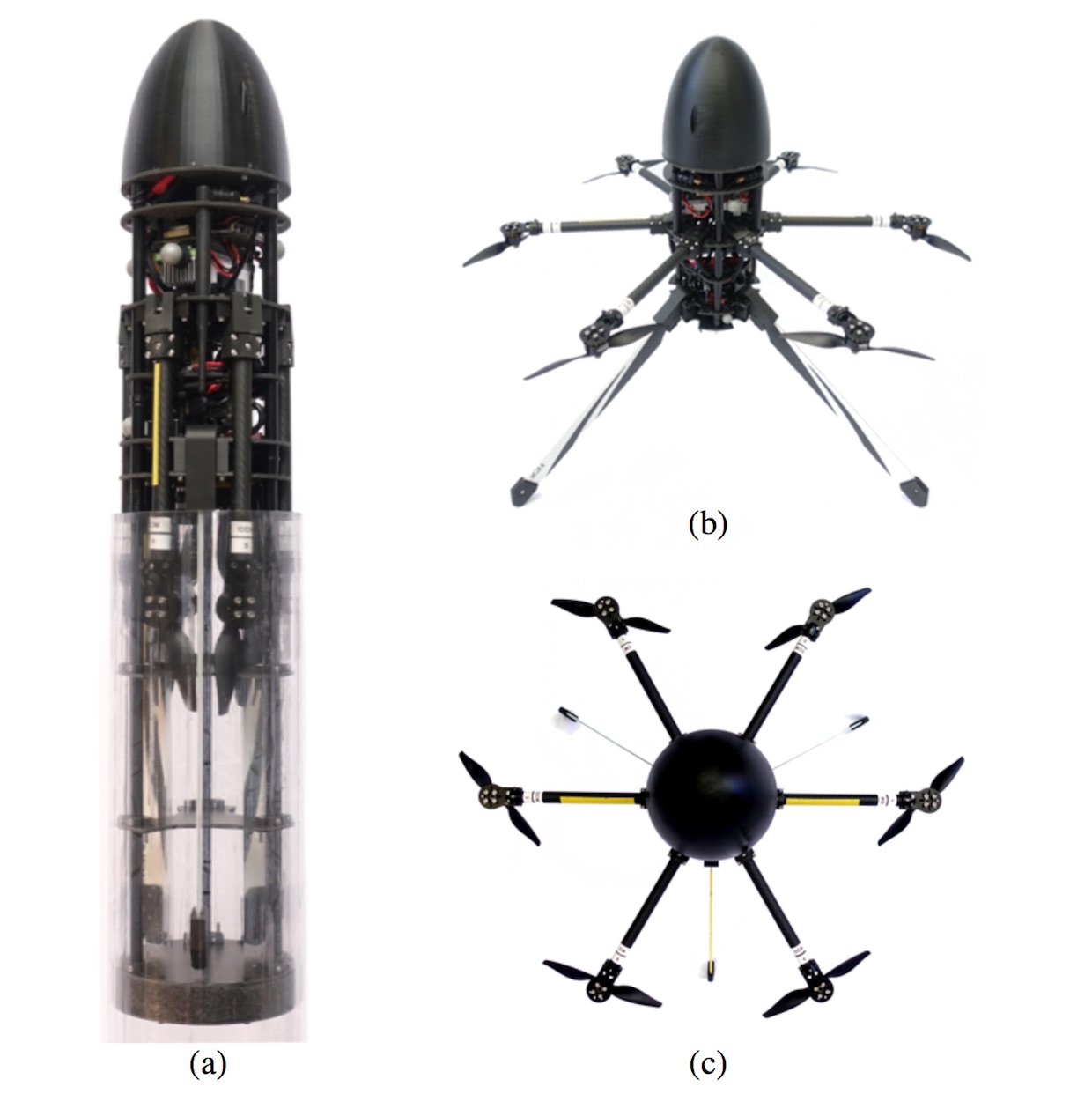
Задача микро-СКВИДа заключалась в том, чтобы разработать общие аэродинамические и конструктивные принципы для мультиротора с баллистическим запуском, а не в разработке чего-то пригодного для выполнения миссии. Способность к выполнению миссии означает, среди прочего, автономность на борту без использования GPS, что, в свою очередь, требует обнаружения и вычислений, которые являются тяжелыми и достаточно энергоемкими, чтобы весь автомобиль нуждался в увеличении. Новый 6-дюймовый SQUID имеет несколько важных обновлений, в том числе обновленную аэродинамическую конструкцию для улучшения пассивной стабилизации во время запуска и баллистического полета за счет использования складываемых плавников. Аппаратное обеспечение автономности состоит из камеры (FLIR Chameleon3), дальномера (TeraRanger Evo 60m), IMU / барометра (VectorNav VN-100) и бортового компьютера (NVIDIA Jetson TX2).
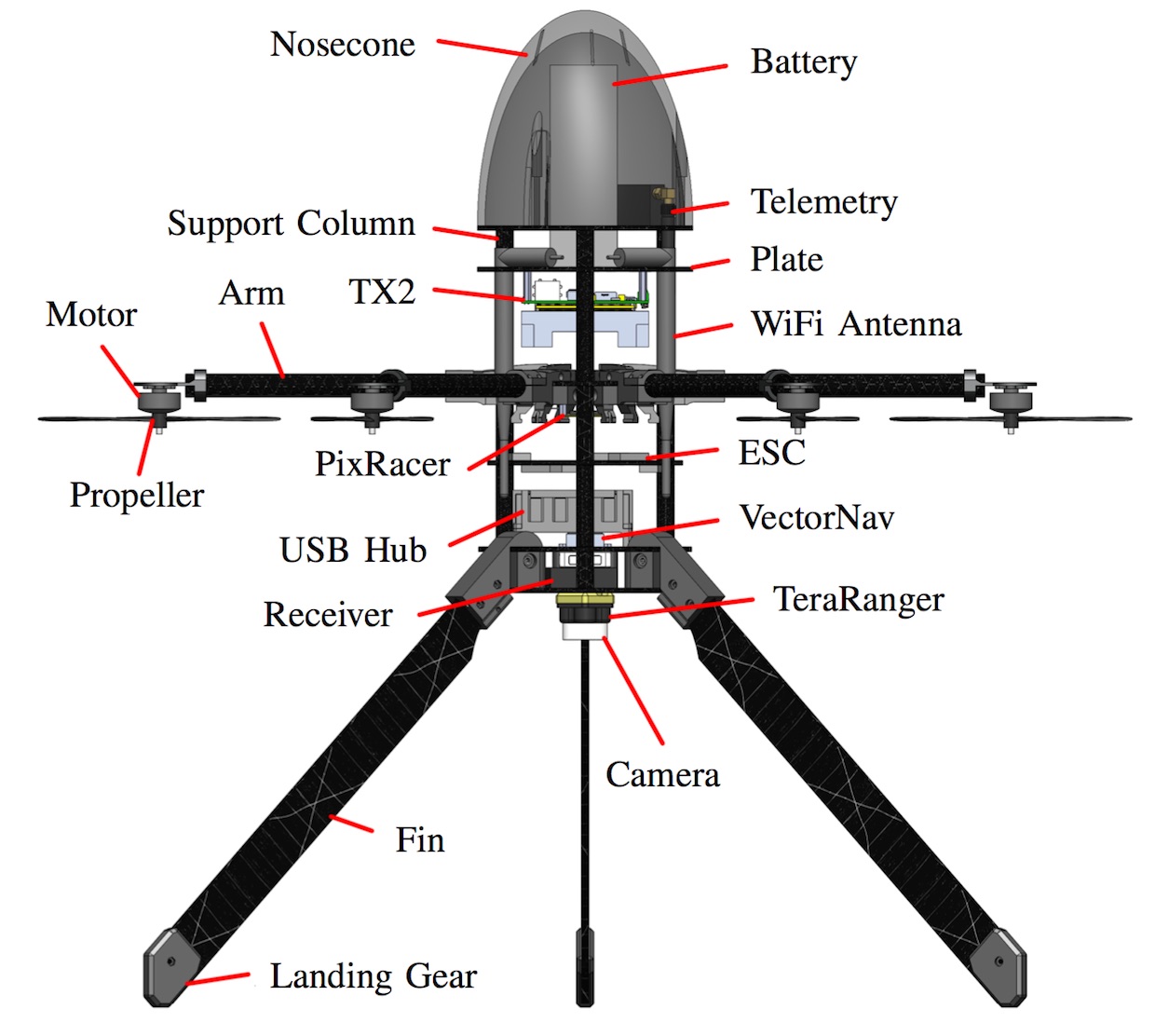
Структурные и аэродинамические изменения необходимы, потому что SQUID проводит первую фазу своего полета вообще не в полете, а просто следуя баллистической траектории, по которой он движется, покидая пусковую установку. Если он идет прямо вверх, это не так уж плохо, но все начинает усложняться, если дрон запускается под углом или с движущегося транспортного средства. Помогает наличие высокого центра масс (батарея живет в носовом обтекателе), а раскрывающиеся плавники выполняют двойную функцию, удерживая дрон пассивно направленным в воздушный поток, одновременно выполняя роль шасси — без плавников он начал бы кувыркаться после выхода. трубку, а затем удачи, пытаясь ее контролировать. Чтобы плавники были складными и достаточно устойчивыми, чтобы на них можно было приземлиться, у них есть фиксирующий механизм, который помогает удерживать их в жесткости,
Этот 6-дюймовый жесткий упор на диаметре SQUID оказался настоящим испытанием. Большинство дронов ограничены по мощности или массе, но SQUID ограничен по объему. Вам нужно не только втиснуть все свои батареи и компьютеры в это пространство, вы должны убедиться, что у датчиков есть необходимое поле обзора, помня, что в сложенном состоянии все руки и ноги должны делиться друг с другом. такое же пространство, как и все остальное. Оказывается, SQUID очень хорошо оптимизирован, хотя весит всего 3,3 кг, всего около 0,3 кг, что, по оценке робототехников, будет весить несгибаемый, неоптимизированный обычный дрон с аналогичными возможностями.
Так зачем возиться со всеми этими хлопотами, связанными с запуском трубы? Есть несколько причин, по которым это стоит усилий:
- Запускается быстро. Там нет ни распаковки, ни установки, ни поиска ровного места, ни приказа всем отойти, просто нажмите кнопку и бац, SQUID выходит из трубы со скоростью 12 м / с и находится в полете.
- Запускать безопасно. Если только кто-то не сидит прямо на вершине пусковой трубы (в этом случае вы можете утверждать, что они заслуживают того, что они собираются испытать), запуск быстро очищает человеческий уровень, прежде чем развертывать какие-либо опасные вращающиеся биты.
- Может запускаться во время движения. Это большая проблема — баллистический запуск и самостабилизация означают, что SQUID может быть надежно запущен с движущегося транспортного средства, движущегося со скоростью до 50 миль в час, например грузовика или лодки, что значительно увеличивает его полезность, особенно в аварийных сценариях.
- Иногда он может запускаться через вещи. Исследователи отмечают, что в его наиболее аэродинамической форме (без оперения и несущих винтов) SQUID потенциально может запускаться прямо через кроны деревьев или линии электропередач, если это необходимо, что является совершенно уникальной возможностью для винтокрылого аппарата.
Мы спросили исследователей об их опыте разработки более крупной версии SQUID, и они поделились с нами этой закулисной историей о том, как им удалось настроить все так, чтобы они ни разу не вылетели:
Переход на более крупный SQUID был технически сложным (так как нам пришлось спроектировать совершенно новый автомобиль), но с логистикой тестирования возникли огромные трудности. Для нашего меньшего SQUID достаточно просто сети и некоторых запасных частей, чтобы проводить испытания в течение дня. Но когда мы перешли на более крупный SQUID, мы бросили в небо что-то более тяжелое и упакованное дорогой электроникой для автономности.
Систему привязного ремня в помещении было сложно установить, потому что высота арены CAST (42 фута в высоту) означала, что идеальная точка расположения привязи была полностью недоступна без сборщика вишен. Клуб дронов Калифорнийского технологического института выступил с инициативой и помог построить систему страховочного троса, обвив крошечный квадрокоптер буксирной леской вокруг потолочных балок. Затем использовалась леска, чтобы протянуть большие веревки.
Одной из интересных вещей, которые были изучены с системой привязи, было чрезвычайное ускорение SQUID при выходе из пусковой трубы, что означало, что кабель привязи становится очень слабым и фактически рискует запутаться или порезаться пропеллерами. К счастью, наша кампания по инкрементному тестированию обнаружила это до того, как у нас возникли какие-либо инциденты. Чтобы справиться с этой ситуацией слабого троса, мы построили носовой обтекатель с 5-футовой трубкой из углеродного волокна, установленной на вершине, которую мы назвали носом SQUID-меч-рыбы (у нас уже была небольшая водная тема). Трос, прикрепленный к раме SQUID, проходит через трубку и соединяется с большей системой троса CAST. Мы подтвердили, что во время запуска (для наших заданных параметров запуска) трос никогда не опускается ниже трубы, поэтому мы предотвратили все взаимодействия троса с пропеллером.
Как и следовало ожидать от беспилотника от Калифорнийского технологического института и Лаборатории реактивного движения, в долгосрочной перспективе план состоит в том, чтобы начать думать о воздушном развертывании — например, о запуске небольших дронов с более крупных самолетов. В конечном итоге это может обеспечить возможность развертывания небольших дронов с космических кораблей на Марсе во время входа в атмосферу, что потенциально снизит потребность в большом посадочном модуле. Фактически, аэрооболочки, которые доставляют посадочные аппараты на поверхности планет , часто восстанавливают баланс во время входа в атмосферу, сбрасывая кучу (например, 150 кг) груза для корректировки угла атаки. Эти веса представляют собой совершенно бесполезные куски вольфрама, но если бы вместо этого можно было сбросить несколько дронов, развертываемых в воздухе, вы потенциально могли бы сделать много дополнительной науки, не добавляя дополнительную массу или риск для существующей миссии.
« Конструкция и автономная стабилизация мультикоптера с баллистическим пуском », написанная Амандой Боуман, Полом Наданом, Мэтью Андерсоном, Даниэлем Пастором, Джейкобом Израелевицем, Джоэлем Бердиком и Бреттом Кеннеди из Калифорнийского технологического института и Лаборатории реактивного движения, была представлена на ICRA 2020, где была награждена лучшая статья по беспилотным летательным аппаратам.