
Спускаемый аппарат НАСА «Curiosity» приземлился на поверхность Марса в августе 2012 года, и вскоре после этого его подвижный грузвыкатился, чтобы начать свою извилистую миссию. В то время как бесстрашный исследователь сделал свое дело, НАСА нуждался в образовательном проекте, чтобы помочь объяснить технологию и миссию широкой публике. Эта роль была заполнена уменьшенной версией под названием ROV-E, и теперь тинкеры, студенты, ученые, занятые неполный рабочий день, и любопытный ровер могут создать свой собственный мини-марсоход для исследования кратеров на заднем дворе и обширных садовых горных хребтов.
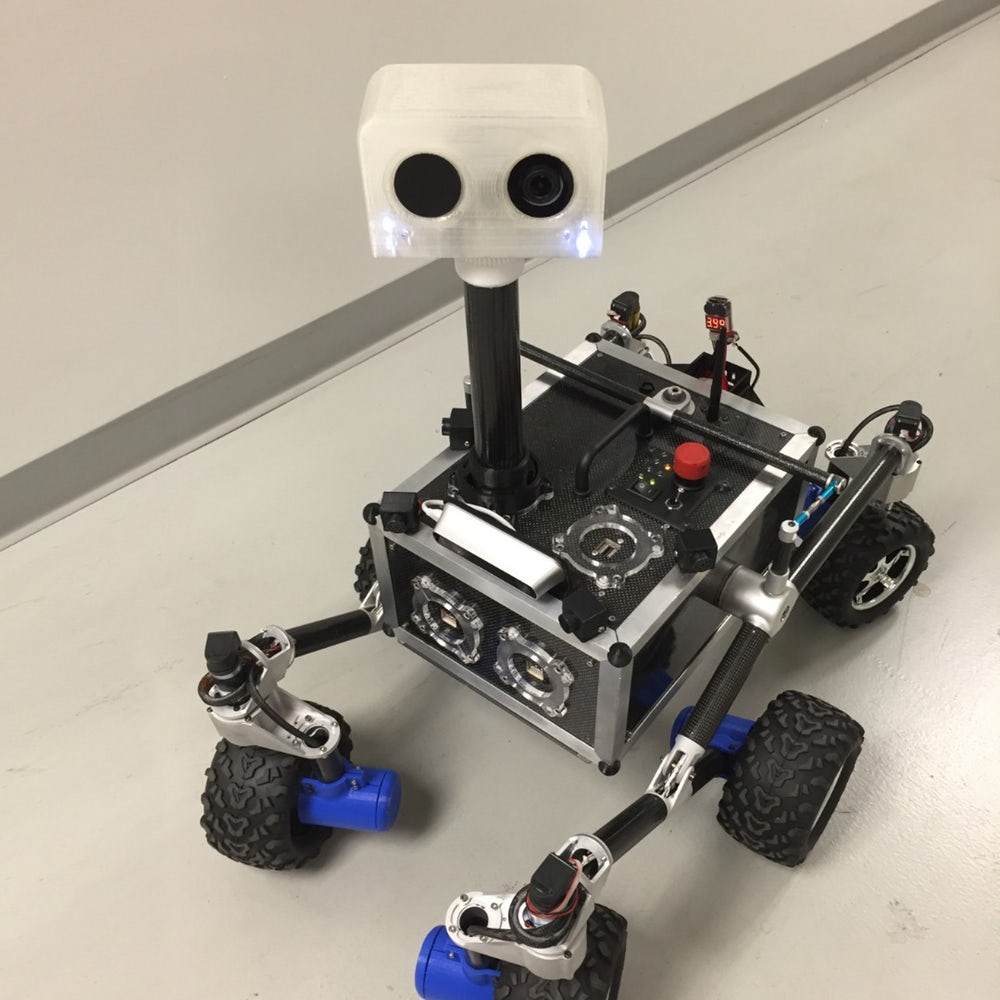
Основанный на марсоходах НАСА « Curiosity» и « Марс 2020» , мини-аутрич-исследователь ROV-E был построен молодыми инженерами, а затем в 2015 году гастролировал, посещая школы, университеты и музеи, чтобы вдохновлять и привлекать молодых людей — наших будущих космических инженеров. Шестиколесный вездеход был разработан для того, чтобы отвечать на вопросы общественности о Марсе, и мог перемещаться по голосовым командам. Он имел встроенный аудио-динамик, комбинированный Raspberry Pi и мозг Arduino, 3D-печатные компоненты и колеса грузовика с дистанционным управлением. И это может подключиться к Интернету.
ROV-E был довольно хорошо принят, и, отвечая на многие запросы людей, которые хотели создать свою собственную, инженеры Лаборатории реактивного движения НАСА в Калифорнийском технологическом институте (JPL) разработали новую модель марсохода, которую может сэкономить каждый, у кого около 2500 долларов США. строить себя из готовых деталей.
«Мы хотели вернуть сообщество и снизить барьер для вступления, передав опыт следующему поколению ученых, инженеров и программистов», — сказал Том Содерстром из проекта JPL.
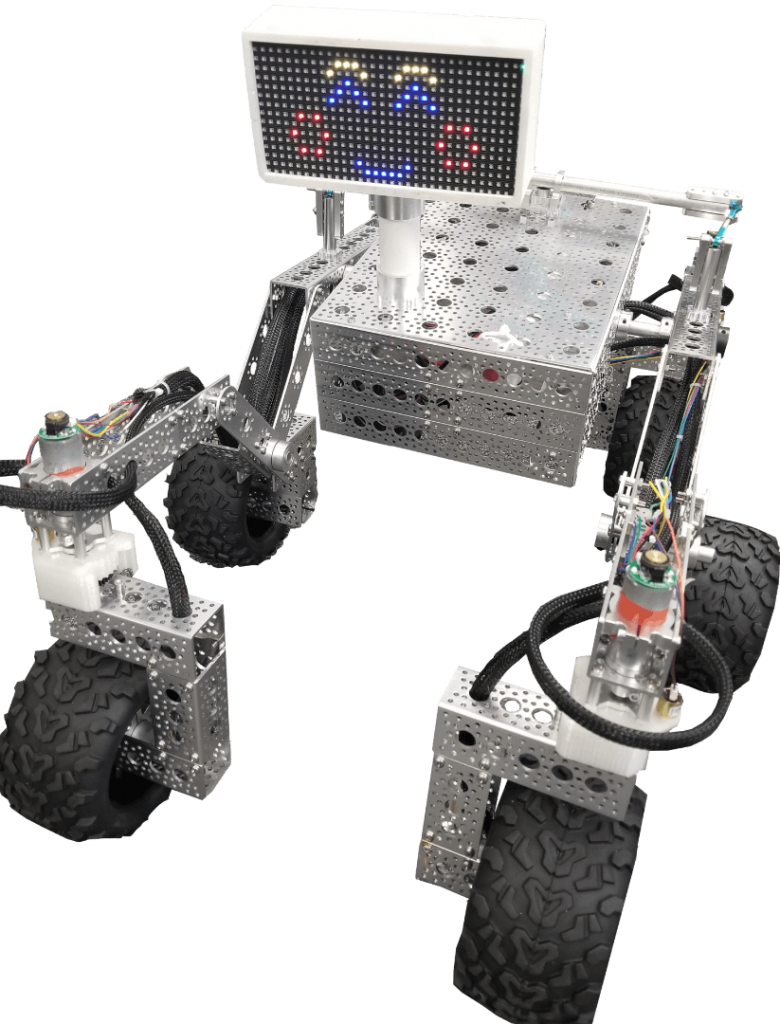
Open Source Rover от JPL имеет такой же шестиколесный рулевой механизм и подвеску-качалку, что и полноразмерный вездеход Curiosity. Базовая модель должна весить 25 фунтов (11,34 кг) и иметь габаритные размеры 24 x 14 дюймов (61 x 30,5 см). Его батарея емкостью 5,200 мАч рассчитана на 5 часов непрерывного использования на одну зарядку, а управление осуществляется через Bluetooth с помощью приложения для Android или через контроллер Xbox. Планы сборки, подробные инструкции и список материалов были опубликованы на GitHub, чтобы каждый мог бесплатно загрузить и начать сборку.
Многочисленные аппаратные и программные принципы обсуждаются в инструкциях, и если робототехники не хотят иметь точную копию ровера, у них достаточно свободы для разработки сборки. Любители могут даже обмениваться идеями друг с другом как часть более широкого сообщества построения.
«Мы выпустили этот марсоход в качестве базовой модели», — сказал менеджер проекта Мик Кокс. «Мы надеемся, что сообщество внесет улучшения и дополнения, и мы действительно рады видеть, что сообщество добавит к нему».