Южнокорейская робототехническая компания Robotis и Open Source Robotics Foundation (OSRF) анонсировали TurtleBot 3 на ROSCon в прошлом году в Сеуле. Нам удалось увидеть множество прототипов , но Robotis все еще находился в процессе выяснения того, как именно будет выглядеть TurtleBot 3 и какое оборудование он будет включать. В то время компания сказала нам, что они хотят, чтобы робот был максимально открытым, модульным и настраиваемым, и мы с нетерпением ждали, чтобы увидеть, что они придумали.
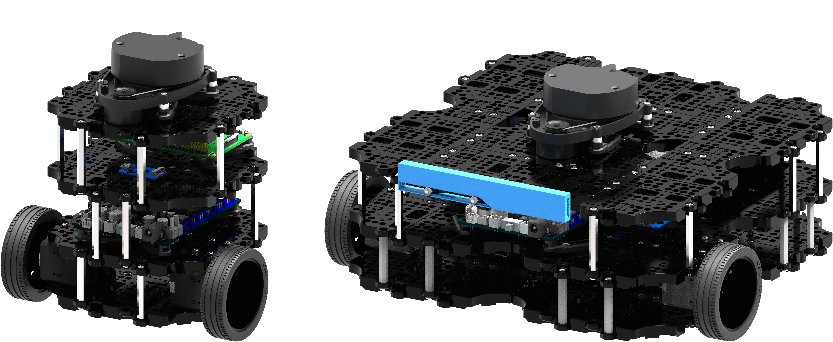
Сегодня Robotis наконец-то готов поделиться с миром новеньким TurtleBot 3 . И, что удивительно, на самом деле существует две модели TurtleBot 3: Burger и Waffle, названные так потому, что каждая из них выглядит так, если вы хотите немного расширить свое воображение:
Несколько недель назад Robotis отправил нам тестовые образцы двух моделей, и, собрав их вместе и немного поиграв с ними, мы получили для вас подробный обзор вместе со всей информацией о цене и доступности.
TurtleBot 3: для кого это?
TurtleBot 2, которому уже пять лет, является (по-прежнему) вполне приличной платформой ROS или операционной системы для роботов , и TurtleBot 3 на самом деле не предназначен для конкуренции с ней. Скорее, TurtleBot 3 использует преимущества нового поколения недорогого вычислительного и сенсорного оборудования, чтобы поместить полную установку ROS в самый маленький и дешевый мобильный робот, насколько это возможно, при этом жертвуя минимальными возможностями и удобством.
Итак, первое, что следует отметить в отношении TurtleBot 3, это то, что его программное обеспечение, как и все ROS в целом, требует крутого обучения, особенно для людей, которые только начинают заниматься робототехникой. Фактически, это может быть не тот робот, которого вы хотите покупать, если вы просто хотите, чтобы робот развлекался ; это робот, которого вы хотите купить, если хотите изучить ROS, а также передовые концепции робототехники и информатики и готовы потратить на это время и усилия.
Мы подозреваем, что все больше и больше людей захотят делать именно это, учитывая растущую популярность ROS среди исследователей, стартапов и крупных компаний . Настоящие и будущие робототехники должны знать ROS, и в этом смысле TurtleBot 3 является многообещающей платформой, помогающей снизить входной барьер для ROS, что действительно было одной из целей первоначальных изобретателей TurtleBot .
Два вкуса: бургер и вафля
Обе модели TurtleBot 3, Burger и Waffle, используют одноплатные компьютеры (вместо нетбуков, которые использовались в предыдущих версиях TurtleBot ) для снижения затрат, и обе работают с последними версиями Ubuntu Linux (16.04.2 LTS) и ROS (Kinetic). . Обе модели поставляются с одним и тем же планарным лидаром на 360 градусов , что позволяет им выполнять SLAM и автономную навигацию прямо из коробки. Кроме того, в них есть почти все конструктивные элементы — пластиковые пластины, металлические стержни, колеса, винты, гайки и заклепки.
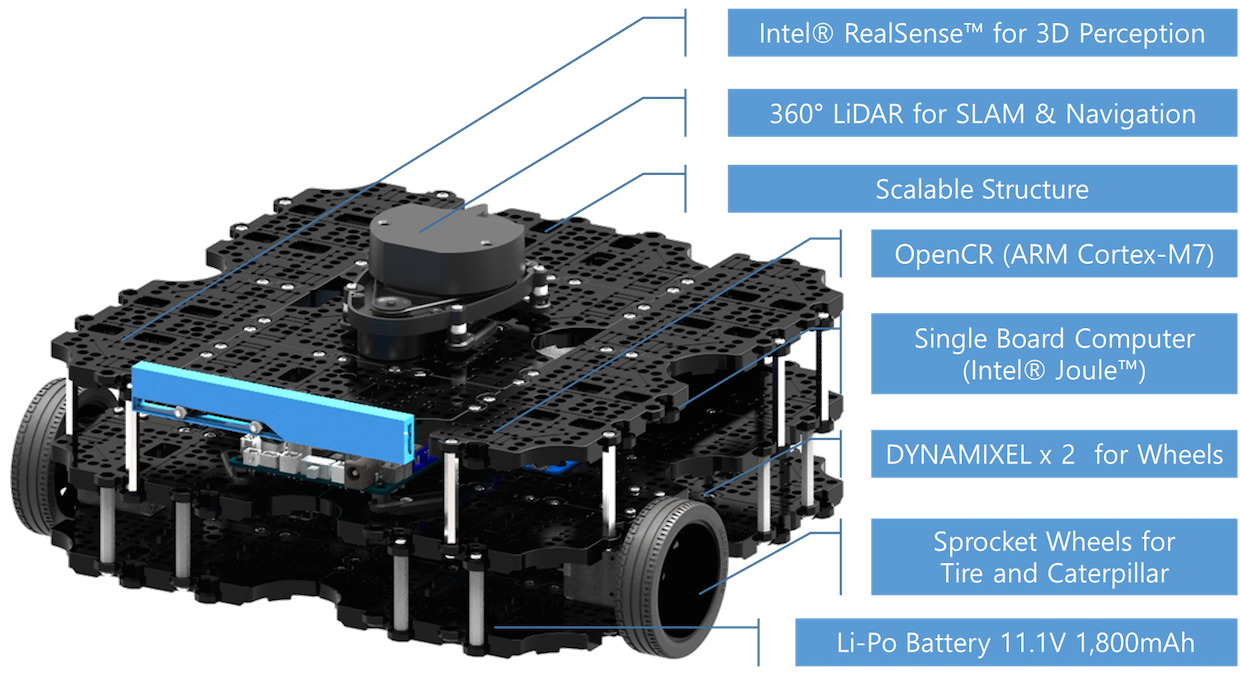
Разница между двумя моделями заключается в том, что Waffle больше и включает в себя значительно лучшие вычисления ( Intel Joule 570x вместо Raspberry Pi 3 Model B ), большую чувствительность ( 3D-датчик Intel RealSense в дополнение к лидару) и более мощный Сервоприводы Dynamixel для привода колес и обработки большей полезной нагрузки.
Вот разбивка различий:
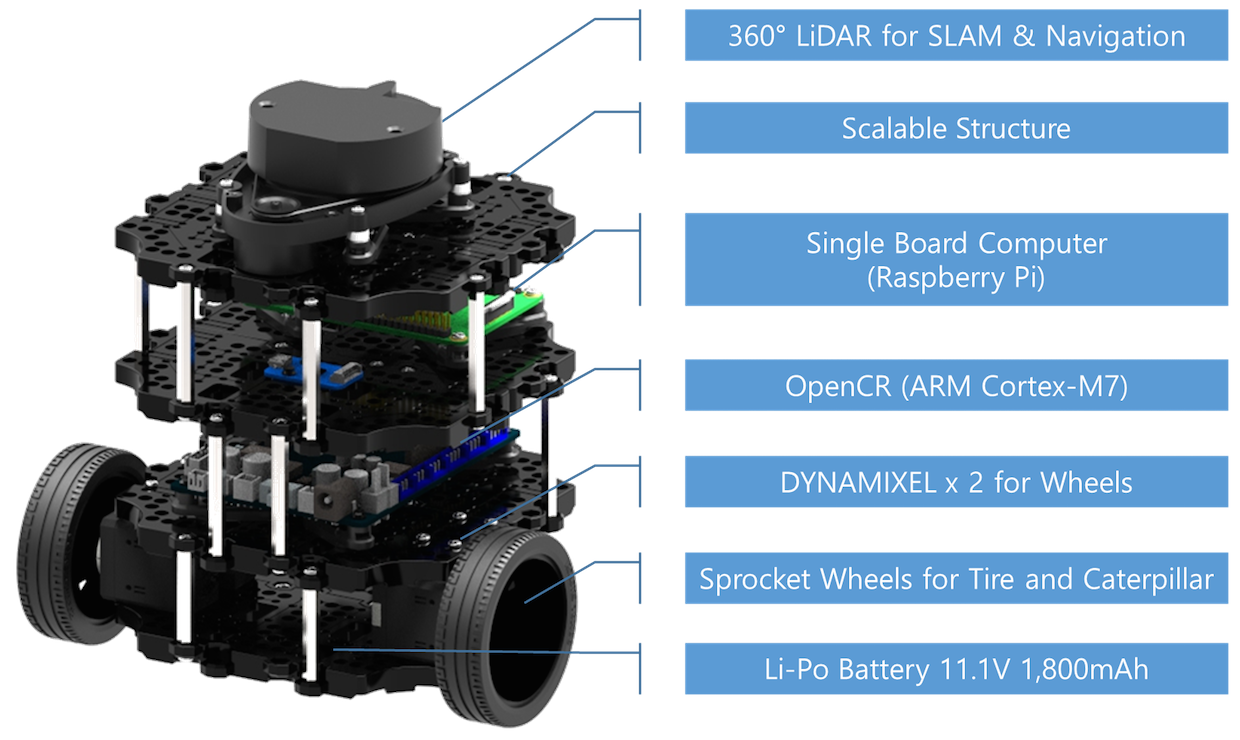
В обеих моделях одноплатный компьютер взаимодействует с платой управления, питаемой от ARM Cortex-M7 , к которой подключены сервоприводы и аккумулятор. Эта плата, разработанная Robotis и названная OpenCR , программируется с помощью среды разработки программного обеспечения Arduino . Таким образом, помимо использования ROS для управления роботом, вы также можете запрограммировать дополнительное поведение с помощью функций и библиотек Arduino C / C ++.
Более того, весь корпус TurtleBot 3 имеет открытый исходный код, что означает, что вы можете распечатать большую часть его самостоятельно или внести изменения в конструкцию (см. Данные САПР для Burger и Waffle ) для создания совершенно новых деталей.
Цена и доступность
Официальный запуск TurtleBot 3 состоится в ICRA в Сингапуре в конце этого месяца, и мы слышим, что может быть задействована огромная вечеринка. Но если вы академический пользователь, хорошие новости: вы можете предварительно заказать TurtleBot 3, начиная с сегодняшнего дня, по сниженной цене ; Burger доступна для США $ 499, и вафельный составляют $ 1599 ( см цен в евро и йене здесь ). Предварительные заказы заканчиваются 29 мая, и после этого две модели TurtleBot 3 будут доступны всем пользователям по рекомендованной розничной цене 549 и 1799 долларов соответственно. Отправка начинается 5 июня.
Теперь давайте посмотрим на аппаратное и программное обеспечение каждой модели.
Попробовать бургер
Бургер прибыл в такой маленькой коробке, что мы не были уверены, что в нее поместится робот. Коробка содержала красивое большое печатное руководство , блок питания и четыре коробки еще меньшего размера, каждая из которых содержала подмножество компонентов робота. Все было очень хорошо организовано и аккуратно упаковано, хотя ни на одном из пакетов с немного разными крошечными винтами не было этикеток, что было раздражением. Однако продуманное включение довольно хорошей магнитной отвертки (единственный инструмент, который вам понадобится) помогло немного восполнить это.
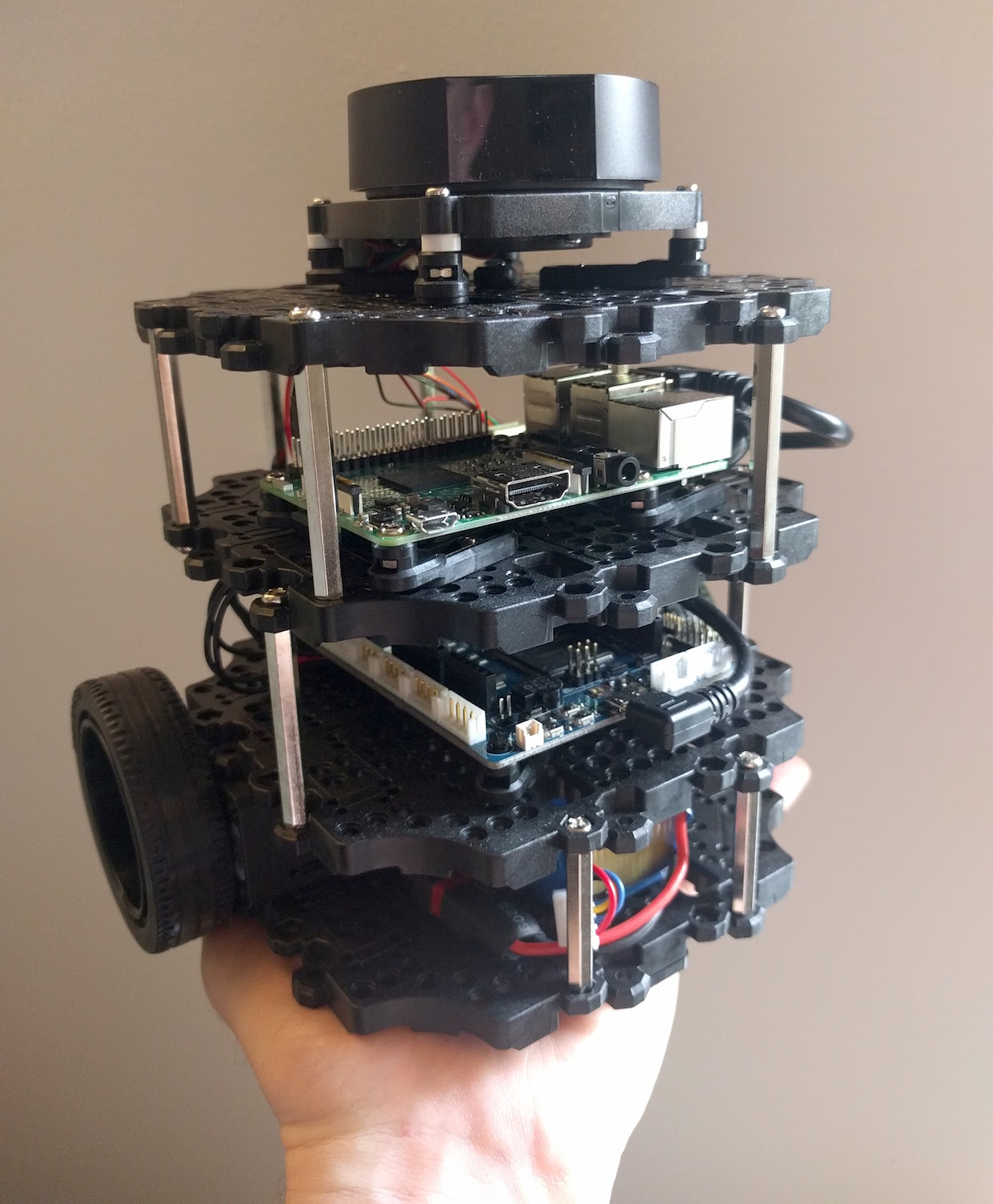
Процесс сборки занял у нас час или два и был в основном прост. Мы следовали иллюстрациям и основным письменным инструкциям в руководстве и создавали Burger слой за слоем (Robotis называет их « этажами » ).
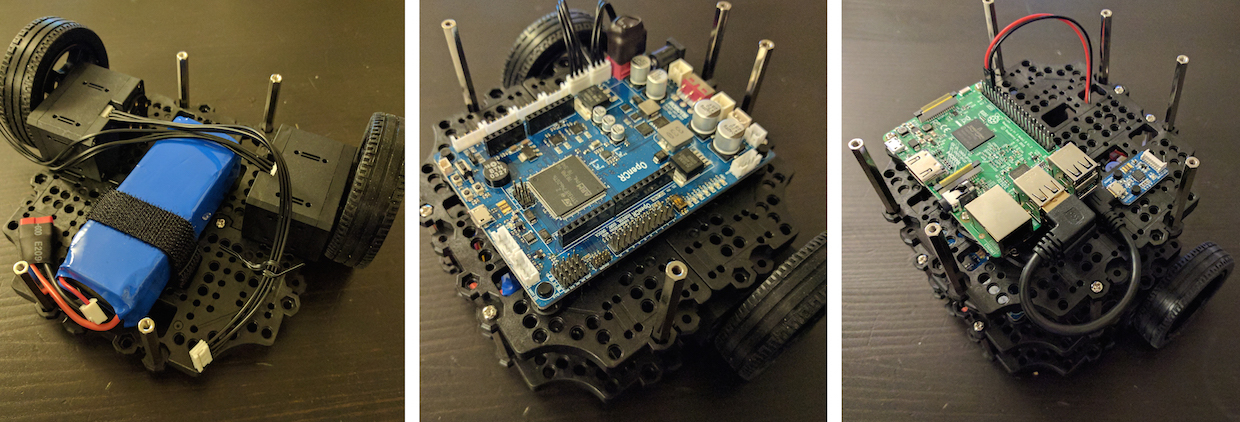
Однако мы столкнулись с некоторыми трудностями. Некоторые инструкции были не так ясны, как могли бы быть, например, какие контакты использовать для питания Raspberry Pi 3, а некоторые вещи вообще не работали, например, подключение прилагаемого USB-кабеля к лидарной плате из-за того, как разъемы на USB-кабеле были ориентированы. Кроме того, если вы будете следовать руководству, порт HDMI на Pi заблокируется, как только робот будет собран. Все эти проблемы можно решить, если вы просто творчески позиционируете компоненты так, чтобы это имело больше смысла, и, надеюсь, Robotis продолжит обновлять свое руководство на основе отзывов первых тестировщиков. Последним шагом было нанесение лидара поверх последнего слоя, и был собран TurtleBot 3 Burger.
Пришло время разжечь его. Robotis собрал обширную онлайн-документацию о том, как запустить TurtleBot 3 . И еще многое предстоит сделать. В то время как плата контроллера OpenCR поставляется с предварительно загруженным программным обеспечением, которое ей необходимо, Raspberry Pi 3 поставляется с пустой картой microSD на 8 ГБ, на которую вам необходимо установить Ubuntu и ROS (карта на 16 ГБ будет более подходящей для это, на наш взгляд). Для этого необходимо подключить клавиатуру, мышь и монитор к самой плате Raspberry Pi 3, используя порты USB и HDMI Pi. (Если у вас есть только ноутбук, вам не повезло, и вам нужно будет купить, одолжить или украсть дополнительное оборудование.) Вам также понадобится второй компьютер с Ubuntu и ROS на нем («удаленный компьютер» ), на котором работает ROS Master и может напрямую общаться с TurtleBot 3 через Wi-Fi.
Существуют специальные версии Ubuntu, которые были разработаны для работы на одноплатных компьютерах, таких как Raspberry Pi 3. Robotis предлагает вам установить версию под названием Ubuntu MATE и предоставляет пошаговые инструкции по установке образа диска на карту microSD из другой компьютер под управлением Ubuntu. Эти инструкции не сработали для нас, и никакие поиски в Google не помогли решить возникающие ошибки, но, к счастью, Robotis включил альтернативный метод с использованием Windows, который и сработал. Как только это будет сделано, вы вставляете карту microSD в Pi, подключаете клавиатуру, мышь и монитор и включаете плату. Он загружается в то, что выглядит как обычная установка Ubuntu, и после того, как вы настроили свой Wi-Fi, теперь вы можете установить ROS.
Полная установка ROS на Pi заняла несколько часов, и Robotis снова предоставляет подробные пошаговые инструкции о том, как это сделать. Сложные вещи, такие как изменение разрешений на доступ к USB и конфигурации сети, упрощаются с помощью снимков экрана и команд, которые вы можете просто скопировать и вставить в окно терминала. Идея состоит в том, что после того, как на Pi все настроено, вы можете отключить монитор, клавиатуру и мышь, а с этого момента просто подключиться к TurtleBot 3 удаленно с другого компьютера.

У нас тут была небольшая икота. По какой-то причине SSH не работал ни на TurtleBot, ни на удаленном ПК, и решение заключалось в переустановке SSH-сервера в обеих системах и проверке правильности порта. Это не обязательно был тривиальный процесс, особенно для тех, кто начал работать с Ubuntu с нуля. И чтобы избежать необходимости каждый раз подключать клавиатуру, мышь и монитор, нам также пришлось выяснить, как заставить SSH запускаться автоматически после загрузки Pi. Когда я говорю «выяснить», мы должны указать, что нам помогал чрезвычайно талантливый и очень красивый профессионал в области робототехники. Если у вас нет одного из них под рукой, всегда есть ответы Google или ROS , но мы надеемся, что Robotis позаботится об этой и других проблемах в течение следующего месяца.
После исправления SSH мы смогли заставить удаленный компьютер разговаривать с Burger, и прошли процедуру запуска ROS. Лидар развернулся, и мы смогли успешно дистанционно управлять роботом с удаленного ПК. Ура! SLAM, отображение и навигация уже настроены Robotis, но они все еще работают над другими приложениями, такими как наша любимая демонстрация Follower. Ко времени официального запуска могут быть готовы и другие интересные вещи.
Практика с вафлями
Объединение TurtleBot 3 Waffle было похоже на то, что мы сделали с Burger: мы построили робота слой за слоем, с той разницей, что в этой модели слои шире. Кроме того, здесь больше деталей — включая 1 94 винта! — поэтому полная сборка заняла почти вдвое больше времени, или около четырех часов.
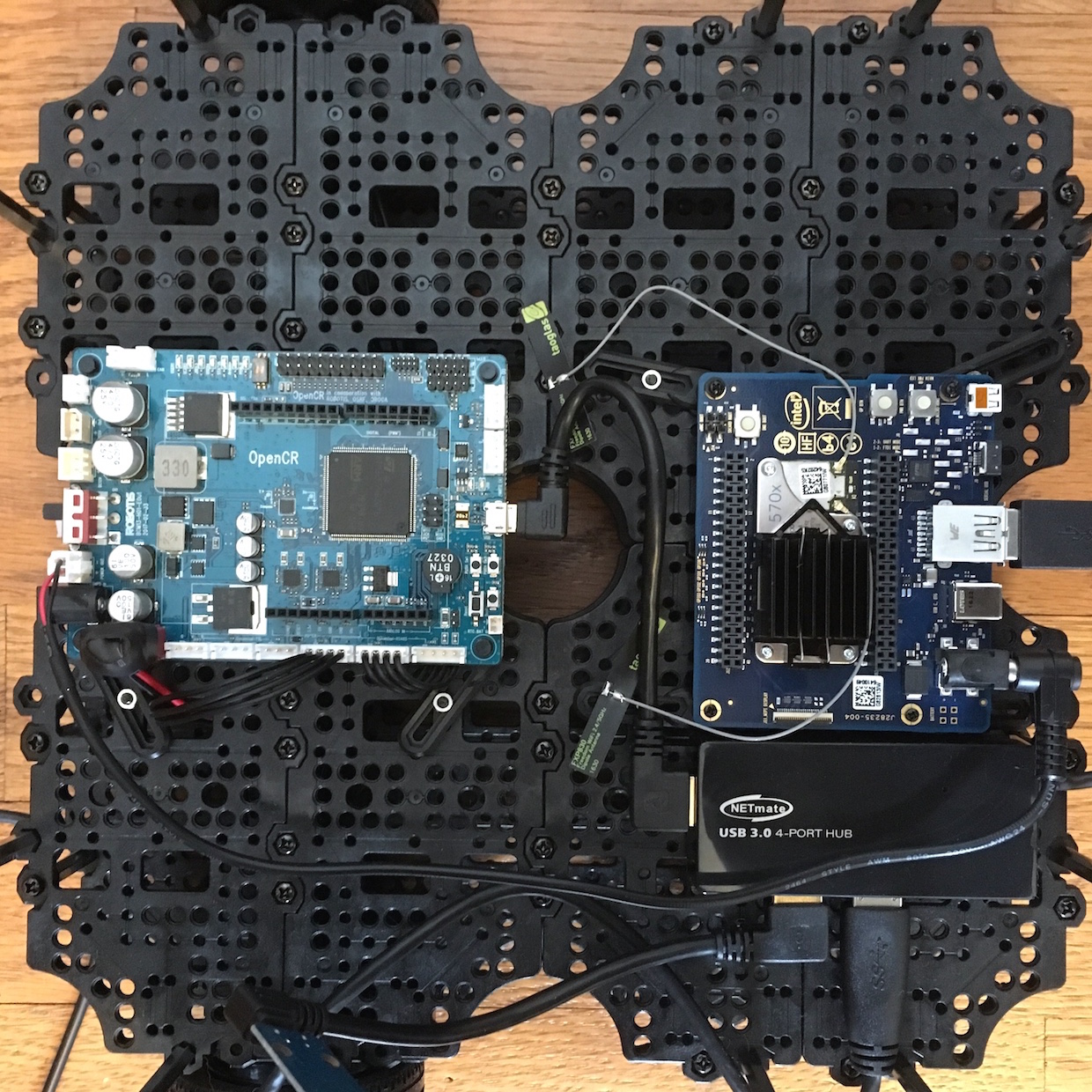
Как и в Burger, на первом слое Waffle находятся сервоприводы Dynamixel (пара XM430 ) и аккумулятор (а под ними два ролика для шариков вместо одного). На среднем уровне все действительно отличается: в этом разделе находятся две основные платы Waffle с контроллером Intel Joule и OpenCR, каждая из которых подключена к четырем опорам печатных плат. Две платы соединены друг с другом через концентратор USB 3.0, который также соединяет Intel RealSense и лидар, оба из которых мы установили на верхнем уровне.
При сборке Waffle нам пришлось расположить некоторые компоненты и кабели не совсем так, как показано в руководстве , как мы это сделали с Burger. В основном это было связано с длиной USB-кабелей и расположением USB-портов. Но в остальном процесс был простым и увлекательным — если вам нравятся маленькие винтики.
Установка программного обеспечения Waffle сразу стала проблемой. Прежде чем вы сможете установить Ubuntu на Joule, вам необходимо обновить его BIOS, и для этого вы должны использовать машину Windows. Видите ли, у нас было несколько нетбуков Mac и Linux, но не было Windows. Итак, первым шагом была установка Windows 10 на один из тех старых нетбуков, процесс, который, как вы понимаете, был медленным и утомительным, но, в конце концов, оказался успешным: мы следовали инструкциям Intel и обновили BIOS Джоуля.
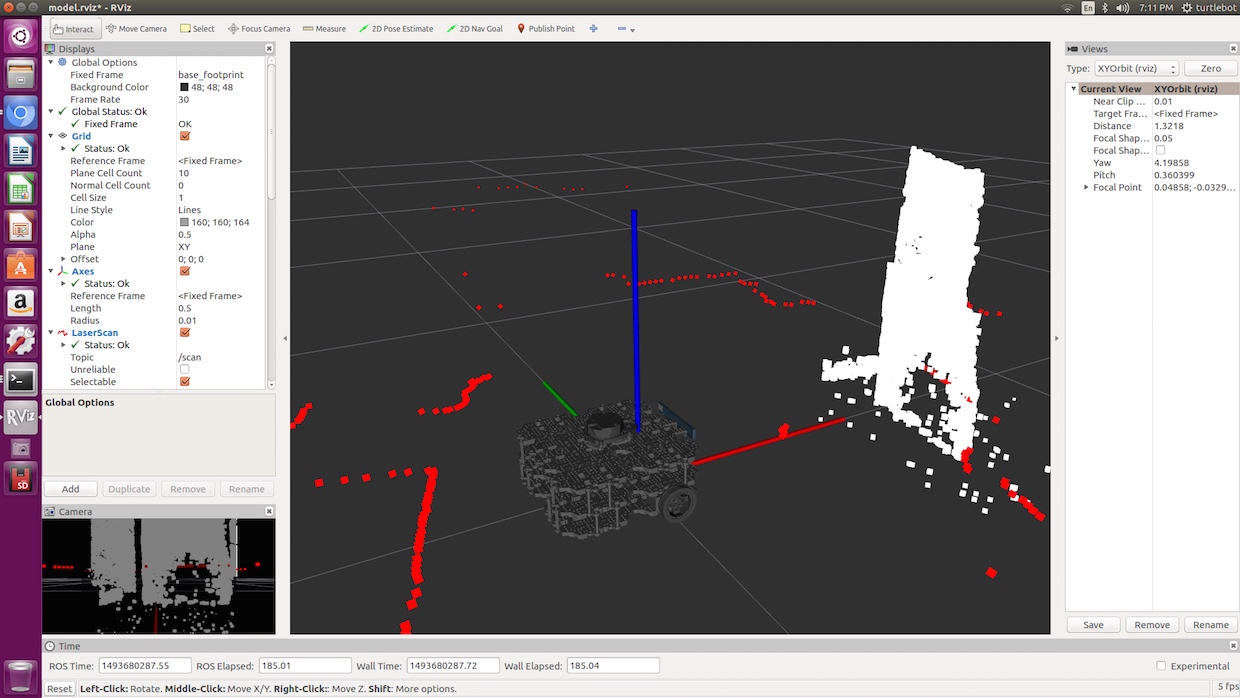
Затем мы создали загрузочный USB-накопитель с образом Ubuntu 16.04 для Joule . Затем мы подключили этот USB-накопитель к Waffle, а также клавиатуру, мышь и монитор (через порт Micro-HDMI), и установка Ubuntu на Joule была легкой задачей. Установка ROS, основанная на онлайн-документации, которую собрал Robotis, также прошла без проблем, и вскоре после того, как Waffle бродил по комнате через дистанционное управление. У нас все еще не было времени исследовать такие вещи, как SLAM и автономная навигация, но мы протестировали лидар и RealSense с помощью RViz , инструмента трехмерной визуализации для ROS.
TurtleBot 3: В целом
Пока что обе модели TurtleBot 3 Burger и Waffle оказались даже лучше, чем мы ожидали. Они компактны, маневренны и запускают ROS как чемпионы без каких-либо компромиссов (хотя еще неизвестно, насколько сильно Raspberry Pi 3 будет ограничивать более требовательные приложения).
К счастью, модульность TurtleBot 3 означает, что вы можете легко обновить его, когда станет доступно новое оборудование, если вы готовы потратить дополнительные деньги. Вы также можете модифицировать корпус робота благодаря защелкивающимся пластинам, которые можно расположить в различных конфигурациях. И мы с нетерпением ждем возможности увидеть, как мы можем расширить робота, чтобы сделать его еще более универсальным, когда Robotis сделает больше деталей, таких как руки и захваты. В частности, мы не можем дождаться появления резиновых гусениц, которые позволят нам превратить наши TurtleBots в мини-танки.
Что касается программного обеспечения, то, если вы пытаетесь изучить ROS с помощью TurtleBot 3 самостоятельно, у вас будет намного лучше, если вы подключитесь к онлайн-сообществу ROS. Мы предполагаем, однако, что TurtleBot 3 будет иметь наибольшее влияние в лабораториях, классах, семинарах и хакатонах, где новые пользователи получат личную поддержку, чтобы помочь им изучить тонкости Linux и ROS. Со своей стороны, Robotis заявляет, что продолжит разработку новых приложений и добавит больше руководств в свою онлайн-документацию. Мы с нетерпением ждем, как будет расти сообщество TurtleBot 3, и если вы уже делаете что-то крутое со своим роботом, дайте нам знать.