Автономные беспилотные летательные аппараты (БПЛА) продемонстрировали большой потенциал для широкого спектра приложений, включая автоматизированную доставку пакетов и мониторинг больших географических территорий. Однако для выполнения миссий в реальных условиях БПЛА должны уметь эффективно ориентироваться и избегать препятствий в своем окружении.
Исследователи из Технологического университета Лулео в Швеции и Калифорнийского технологического института недавно разработали вычислительную технику на основе нелинейного моделирования, основанную на прогнозирующем управлении (NMPC), которая может предоставить БПЛА лучшую навигацию и возможности обхода препятствий. Используемый ими подход NMPC, представленный в статье, опубликованной в IEEE Robotics and Automation Letters , основан на структуре OpEn (Optimization Engine), программного обеспечения параметрической оптимизации, разработанного доктором Пантелисом Сопасакисом из Королевского университета в Белфасте.
«Наша команда ранее опубликовала несколько работ по автономному избеганию препятствий и навигации для БПЛА», — сказал TechXplore Бьорн Линдквист, один из исследователей, проводивших исследование. «В нашем недавнем исследовании мы решили расширить понятие уклонения от препятствий, включив в него прямое рассмотрение движущихся или динамических препятствий с использованием NMPC. Наша цель заключалась в том, чтобы предложить техническую демонстрацию того, как современные и интеллектуальные управляющие структуры могут позволить БПЛА используется, например, в городских условиях, где окружающие постоянно движутся и где предотвращение столкновений имеет большое значение для обеспечения безопасности людей и других транспортных средств ».
NMPC — это схема, основанная на оптимизации, которую можно использовать для решения множества реальных проблем. Эта схема может делать прогнозы будущих состояний системы на основе математической модели системы и ряда управляющих входов, действующих на нее в данный момент.
Его прогнозы охватывают ряд будущих временных шагов, которые вместе называются «горизонтом прогнозирования». Впоследствии схема вычисляет управляющие входные данные способами, которые позволяют системе наиболее эффективно выполнять набор желаемых целей (например, отслеживание ссылок , избегая препятствий, поддерживая ограничения и т. д.).
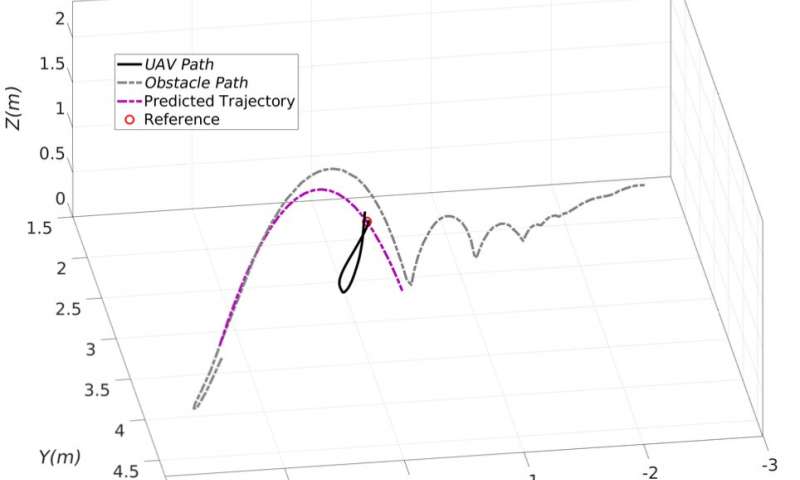
В своей статье Линдквист и его коллеги показали, что модель на основе NMPC может предоставить БПЛА усовершенствованную автономную навигацию и возможности обхода препятствий в меняющихся условиях, например в городах. В частности, они использовали алгоритм NMPC для прогнозирования траекторий препятствий в окрестностях БПЛА, а также использовали модель классификации для различения различных типов траекторий и прогнозирования будущего положения препятствий.
«Поскольку NMPC работает путем прогнозирования и оптимизации будущих состояний, мы можем включить прямое рассмотрение движущихся / динамических препятствий, также прогнозируя их будущее положение на основе некоторых измерений», — сказал Линдквист. «Этот метод обеспечивает элегантное решение, в котором управление, локальное планирование пути и динамическое предотвращение препятствий объединены на одном уровне управления».
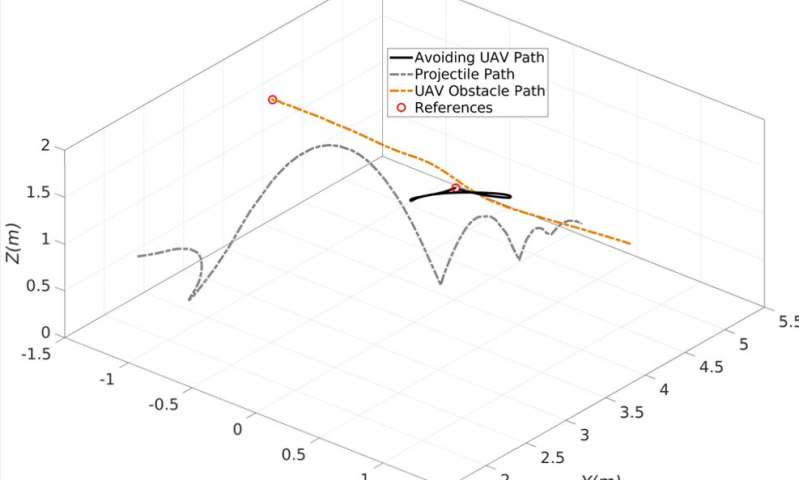
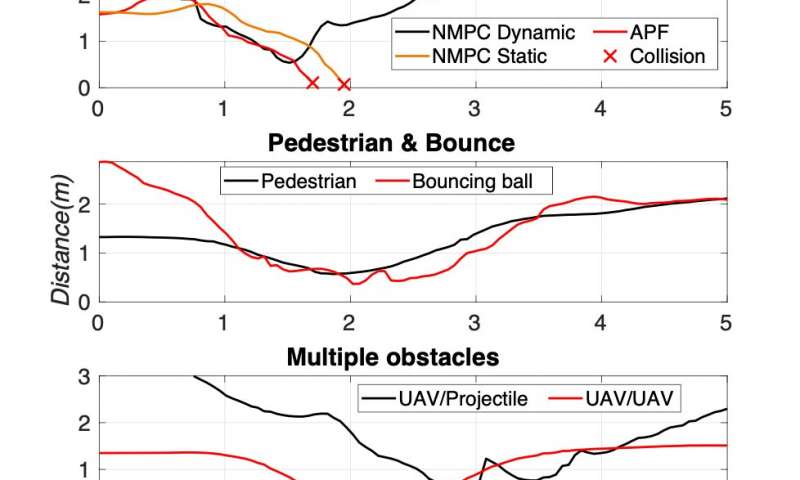
Исследователи оценили свою схему NMPC в ряде лабораторных экспериментов. Примечательно, что их модель предотвращала столкновения в различных сценариях, в которых БПЛА был окружен множеством движущихся препятствий.
«В группе робототехники и искусственного интеллекта Технологического университета Лулео мы придаем большое значение экспериментальной проверке теории, — сказал Линдквист. «В нашей недавней работе мы показали, как архитектура NMPC может обеспечивать траектории без столкновений даже для довольно быстро движущихся препятствий, не нарушая указанных безопасных расстояний. Я считаю, что этот тип обхода препятствий — интересный путь к использованию БПЛА в городских условиях. или в тесном взаимодействии с людьми ».
Исследование подчеркивает большой потенциал схем оптимизации NMPC для расширения навигационных возможностей БПЛА. Выводы, полученные Линдквистом и его коллегами, также могут вдохновить другие исследовательские группы на использование аналогичных методов оптимизации для управления роботами и планирования пути. В конечном итоге это может помочь в разработке беспилотных летательных аппаратов и других мобильных роботов, которые могут безопасно перемещаться в многолюдной и динамичной среде.

«В рамках проекта DARPA Subterintage Challenge в команде CoSTAR , я считаю, что в течение следующего года или около того много наших усилий будет направлено на изучение темы подземных исследований и планирования пути для БПЛА», — добавил Линдквист. «Для динамического обхода препятствий, продемонстрированного в этой статье, мы планируем провести будущие исследования, направленные на интеграцию бортовых камер глубины (или аналогичных) для отслеживания препятствий, а также на улучшение и обобщение нашего метода прогнозирования препятствий».