С точки зрения общей отдачи от ваших денег твердотопливные ракеты довольно хороши: они предельно просты, очень надежны и предлагают приличную эффективность в очень маленьком форм-факторе, если вы готовы выдержать большую тягу. все сразу и никогда больше. Хотя некоторые роботы пытались использовать ракеты для прыжков с места на место , управляемость всегда была проблемой, поскольку твердотопливные ракеты дают вам фиксированную тягу, хотите вы этого или нет, и эта тяга не всегда направлена внутрь. именно так, как вам хочется.
На прошлой неделе на конференции ICRA исследователи из Японского агентства аэрокосмических исследований (JAXA) представили небольшой робот-исследователь, который использует одну твердотопливную ракету для запуска в воздух. Новым является то, что их робот включает в себя несколько тормозных ракет, которые помогают ему совершать точные приземления, а также умную гироскопическую систему, которая гарантирует, что он летит прямо, а также дает роботу возможность передвигаться после приземления.
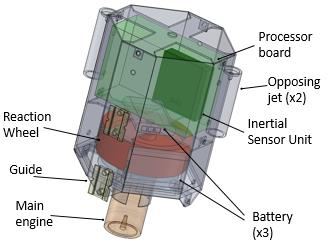
450-граммовый робот состоит из корпуса с батареями и датчиками, реактивного колеса (также внутри корпуса), основного твердотопливного ракетного двигателя ( Estes C11 с общим импульсом 10 ньютон-секунд) и двух меньших противостоящих. тяговые двигатели. Робот установлен на наклонной направляющей, и когда приходит время летать, он раскручивает свое реактивное колесо и запускает основную ракету. Ракета запускает робота по параболической траектории с максимальной дальностью при земной гравитации примерно до 30 метров, которая увеличится примерно до 200 метров под лунной гравитацией.
Колесо реакции минимизирует эффект кувырка тела робота во время полета, удерживая робота на прямой линии: мы держали эту маленькую вещь с включенным гироскопом во время интерактивного сеанса в ICRA, и она была впечатляюще мощной: значительное сопротивление любому боковому вращению. Поскольку твердотопливные ракетные двигатели нельзя дросселировать, при необходимости запускаются двигатели встречной тяги, чтобы изменить траекторию робота для целевой посадки. Это довольно эффективный метод, и в их тестах стандартное отклонение серии пусков уменьшилось с 1,2 до 0,29 метра, что в четыре раза точнее, чем без противостоящих ракет.
Очевидным недостатком такого робота является отсутствие возможности повторного использования: всего с одним основным двигателем вы получаете один большой прыжок и не более того. Но аргумент состоит в том, что вместо этого вы получаете систему с очень высокой эффективностью: малый размер и вес в сочетании с очень большим радиусом действия. Вы можете решить взять с собой группу этих маленьких исследователей ракет на базовом корабле марсохода, а не одну более крупную систему, которую можно использовать повторно, но с меньшей дальностью действия и более сложной (и, следовательно, менее надежной) в эксплуатации.
Перспективный сценарий описывается следующим образом. Миниатюрный робот с ракетным двигателем загружается на планетарный спускаемый аппарат или, возможно, на вездеход. Базовый корабль приближается к целевому сайту, но материнский корабль не может достичь целевого сайта. В то время как оператор знает направление и расстояние до целевой площадки, он / она регулирует направление и высоту рельса пусковой установки робота в верхней части корабля-носителя. Угол возвышения рельса устанавливается таким образом, чтобы ракетный робот мог достичь целевой точки с наименьшим ожидаемым импульсом тяги главного двигателя. После включения реактивного колеса зажигается главный двигатель. Когда робот летит, его поза и положение оцениваются с помощью инерциальной навигации. Чтобы отменить превышение расстояния, в соответствующем случае зажигается противодействующая струя.
После того, как все запуски ракеты завершены, у робота все еще есть трюк с мобильностью в рукаве: раскручивая свое реактивное колесо и тормозя его, он может бросаться вперед или назад ( трюк, который мы видели у других роботов, таких как MIT M- Блоки, делаю ). Возможно, это не самый управляемый метод передвижения, но для исследования планет преимущество в том, что это закрытая система, которую можно изолировать от пыли.
Эта версия робота не имеет встроенного амортизатора, а также не имеет вращающегося внешнего корпуса, который мог бы обеспечивать панорамные изображения камеры в полете. Также следует подумать о научных инструментах, которые достаточно малы, чтобы их можно было втиснуть. Что кажется наиболее интересным, так это возможность таких роботов (или, возможно, гораздо меньших версий) работать в условиях очень низкой гравитации, таких как астероиды и небольшие луны, где ракеты могут быть лучшим (или единственным) способом передвижения.