Когда Ёити Масуда задумал разработать нового робота на ногах, он нашел вдохновение в марсианских штативах из классического научно-фантастического романа Герберта Уэллса «Война миров ». Трехногая конфигурация, кажется, дает некоторые преимущества, когда дело доходит до ходьбы и равновесия, и Масуда заинтересовался отсутствием в природе трехногих животных. Есть ли эволюционные факторы, объясняющие, почему мы их не видели? А если бы существовали трехногие существа, мог бы существовать универсальный принцип шагающего передвижения, общий для двуногих, трехногих и четвероногих? Чтобы изучить эти вопросы, Масуда и его коллеги из Университета Осаки построили трехногого робота по имени Марсианин.
Интересный вопрос, почему именно нет трехногих существ. Есть несколько животных (например, кенгуру и рыба-тренога , которая существует полностью), которые являются своего рода трехногими, поскольку они используют две конечности и хвост для передвижения. Однако оба этих животных демонстрируют двустороннюю симметрию, а это означает, что их левая половина является зеркальным отображением их правой половины. Подавляющее большинство животных подобны этой симметрии, хотя есть интересные (и очень незначительные и специфические) исключения, включая клювов , сов, некоторых крабов, нескольких видов китов и, конечно же, могучего медоеда , у которого есть один дополнительный зуб на левая сторона. Есть также организмы с радиальной и сферической симметрией.
Но все это на самом деле не отвечает на вопрос о том, что не так с трехсторонней симметрией: были ли марсиане и их треноги в «Войне миров» на чем-то, или есть какая-то фундаментальная причина, по которой трехстороннее передвижение не так эффективно или полезен как двуногое или четвероногое передвижение?
Десять лет назад, Деннис Хонг и его команда Ромела разработали трехногий робот под названием Strider , то самовозбуждение трехногого Dynamic Experimental Robot, который они использовали для тестирования различных трехногих походок . Эксперименты показали, что STriDER может ходить, но, как и большинство трехногих роботов, которых мы видели, он больше походил на прерывистого двуногого человека, в основном используя две из трех конечностей одновременно.
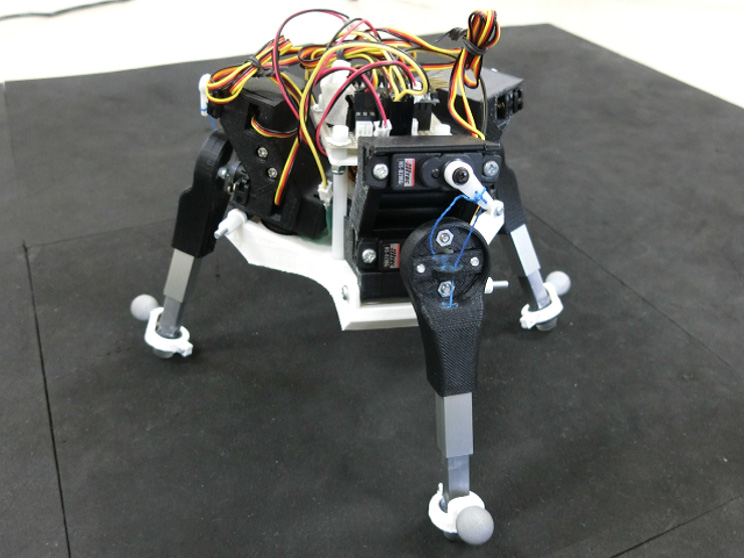
Трехпедальный дизайн Йоичи Масуды отличается в этом отношении. Его робот имеет не только трехстороннее симметрию , но трехстороннее г аи а. Другими словами, каждая из трех опор движется одинаково, за исключением того, что они не совпадают по фазе:
Этот робот, марсианский Petit, имеет три хорошо податливых модуля ног и может двигаться как по кругу, так и по линии, при этом ни одна нога не знает, что делают другие ноги, как объясняют исследователи в недавней статье:
Схема управления. . . состоит из фазового осциллятора и сенсорной обратной связи силы реакции от земли, где закон управления для каждой ноги отделен от других (т. е. он не имеет явной обратной связи с информацией о других ногах). Показано, что ротационная и поступательная локомоция успешно возникает с помощью метода управления в зависимости от выбора соотношения частот осцилляторов.
Описанный здесь децентрализованный подход уже успешно применялся к другим видам биомиметических роботов, и различные виды стабильной походки могут возникать автономно. То же самое и с роботом-треногой: в зависимости от того, какая частота колебаний выбрана, робота можно заставить вращаться или двигаться в одном направлении, не запрограммировав для него эту конкретную походку. Исследователи надеются, что, продолжая работать над своим роботом, он даст некоторые ответы о том, как животные эволюционировали, чтобы двигаться так же, как они, и, возможно, почему ни у кого из них нет трех ног.
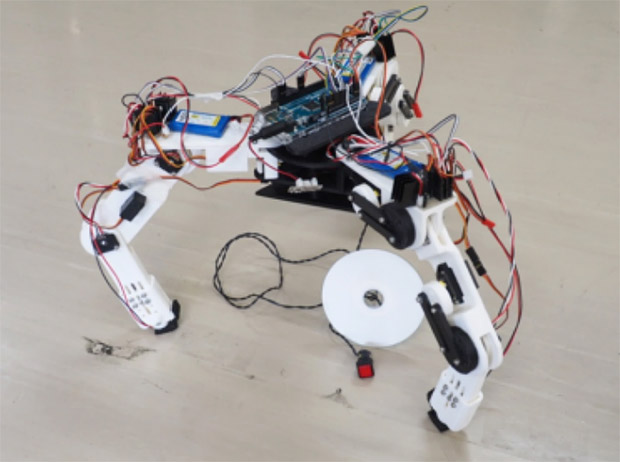
Хотя это третье поколение марсианских роботов, созданных исследователями из Осакского университета, оно было намеренно разработано с очень простой динамикой, чтобы упростить решение проблемы генерации походки. Исследователи под руководством Масато Исикавы , профессора машиностроения в Университете Осаки, уже работают над новой версией с несколькими дополнительными степенями свободы (и, следовательно, более сложной динамикой) в ногах.