Крошечные роботизированные насекомые могут показаться немного более забавными, гадкими гаджетами для некоторых, но потенциал этих кибер-тварей в таких областях, как поиск и спасение, сельское хозяйство и обнаружение опасностей, огромен — как и препятствия. Источники питания, встроенные датчики, управление и стабильность — все это проблематично на микроуровне. Именно над этой последней проблемой — стабильностью — исследователи из Университета Южной Калифорнии (USC) работали со своей Bee +, черпая вдохновение — и снова — из мира насекомых.
Микромасштабные летающие роботы, похожие на насекомых, уже некоторое время летают вокруг. Например, в 2007 году была организована финансируемая DARPA робота-муха (которая только поднималась и опускалась), а в 2008 году DelFly Micro объемом три грамма (0,1 унции) был объявлен в следующем году Книгой рекордов Гиннесса как «самый маленький оборудованный камерой самолет в мире «. Но когда в 2013 году RoboBee впервые набрала 80 миллиграмм (0,0028 унции) Гарварда, DelFly Micro выглядел как альбатрос с кирпичом в кармане.
Это формат RoboBee, который исследовательская группа USC расширила в своем проекте Bee +, который был представлен IEEE Robotics and Automation Letters в этом месяце. RoboBee Гарварда был ограничен в своей маневренности тем, что у него была только одна пара крыльев. Это затрудняло управление полетом, а стабильность полета несколько шаткой. С одной парой крыльев — каждое из которых управляется крошечным пьезоэлектрическим приводом на 25 мг — операторы RoboBee могут влиять на крен, наклон и тягу, но не рыскание.

Команда USC заметила, что для того, чтобы добавить контроль рыскания в смесь, Bee + действительно требовалось четыре крыла, как это делают настоящие насекомые, но это рисковало добавить значительный вес роботу. Приводы на RoboBee уже составляли 50 мг от общего количества в 80 мг, а добавление еще двух делало бы крошечного робота слишком тяжелым для полета.
Итак, команда ОСК сделала более легкие и качественные приводы. RoboBee использует биморфные приводы, состоящие из трех слоев. Два внешних пьезоэлектрических слоя поочередно сжимаются посредством сигнала, и это, в свою очередь, изгибает внутренний слой взад-вперед и, таким образом, взмахивая им, как крыло насекомого. Напротив, команда USC создала униморфные приводы. В них используется только одна полоска пьезоэлектрического материала, которая перемещает пассивный слой вперед и назад. В результате улучшения управления полетом означает, что Bee + способен следовать по траектории и избегать препятствий. А поскольку эти униморфные приводы проще, их также дешевле создавать.
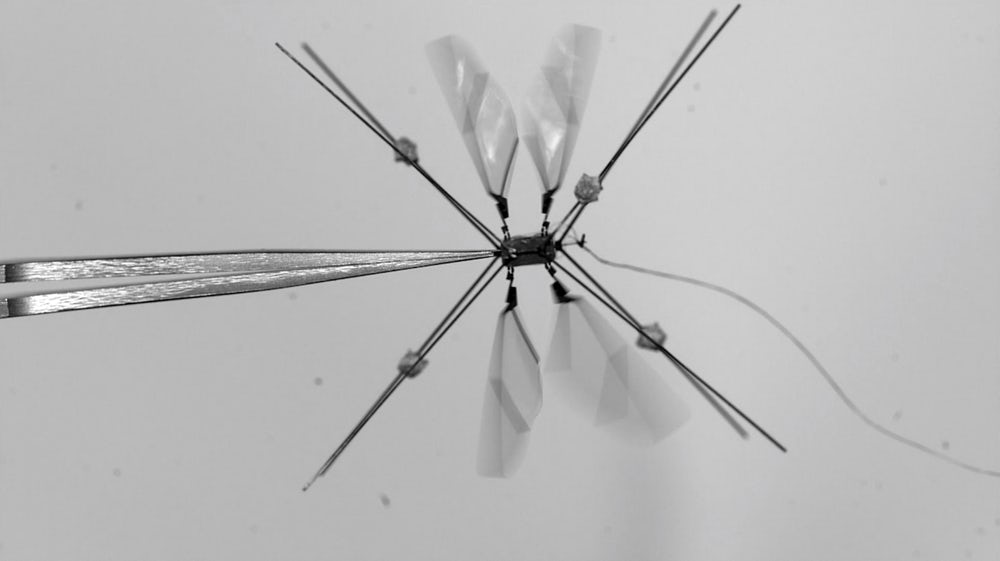
Фактически, приводы Unimorph составляют половину веса биморфных версий, что означает, что даже с четырьмя 33-мм (1,3-дюймовым) крылом Bee + весит всего 95 мг (0,0033 унции). А поскольку нагрузка всего робота распределяется между четырьмя крыльями, а не двумя, ожидается, что срок службы и ожидаемый срок службы пчелы будут намного больше, чем у ее двухкрылых собратьев.

Однако путь для летающих микро-роботов все еще труден. Bee + все еще весит примерно в 10 раз больше, чем у шмеля, и проблемы с бортовым питанием и микросхемами достаточно малы, чтобы сделать жизнеспособные полезные нагрузки все еще нуждающимися в решении, а набор навыков необходим для многих разнородных научных дисциплин. Так что пока не заказывайте свой робот-улей.