Инженеры Калифорнийского университета в Сан-Диего разработали способ создания мягких роботов, которые являются компактными, портативными и многофункциональными. Прогресс стал возможным благодаря созданию мягких трубчатых приводов, движения которых управляются электрически, что упрощает их интеграцию с небольшими электронными компонентами.
В качестве доказательства концепции инженеры использовали эти новые приводы для создания мягкого робота с батарейным питанием, который может свободно ходить по плоской поверхности и перемещать объекты. Они также создали мягкий захват, который может захватывать и поднимать мелкие предметы.
Команда, возглавляемая профессором механической и аэрокосмической инженерии Калифорнийского университета в Сан-Диего Шэнцян Цай, опубликовала работу 11 октября в журнале Science Advances .
Проблема с большинством мягких приводов заключается в том, что они имеют громоздкие настройки. Это потому, что их движения управляются прокачкой воздуха или жидкости через камеры внутри. Таким образом, создание роботов с такими типами приводов потребует их привязки к насосам, большим источникам энергии и другому специализированному оборудованию.
В текущем исследовании инженеры Калифорнийского университета в Сан-Диего создали мягкие приводы, управляемые электричеством. «Эта особенность делает наши трубчатые приводы совместимыми с большинством недорогих, имеющихся в продаже электронных устройств и батарей», — сказал Цай.
Видео с электрически управляемыми мягкими трубчатыми приводами, используемыми в мягких робототехнических устройствах. Кредит: Qiguang He
Приводы сделаны из материала, используемого для изготовления искусственных мышц в роботах, который называется жидкокристаллическими эластомерами. Они состоят из молекул жидких кристаллов, заключенных в эластичную полимерную сеть. Что особенного в этих материалах, так это то, что они изменяют форму, двигаются и сокращаются в ответ на раздражители, такие как тепло или электричество, подобно тому, как мышцы сокращаются в ответ на сигналы нервных клеток.
Чтобы сконструировать каждый привод, инженеры зажали три нагревательных провода между двумя тонкими пленками жидкокристаллического эластомера. Затем материал сворачивают в трубку, предварительно растягивают и подвергают воздействию УФ-излучения.
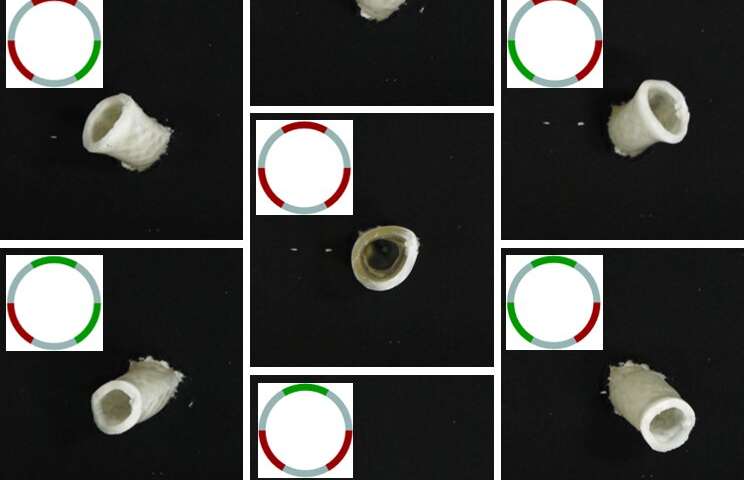
Каждой нагревательной проволокой можно управлять независимо, чтобы трубка изгибалась в шести разных направлениях. Когда электрический ток проходит через один или два провода, он нагревает часть трубки и заставляет ее изгибаться в направлении этих проводов. Когда ток проходит по всем трем проводам, вся трубка сжимается, сокращаясь по длине. При отключении электричества трубка медленно остывает и возвращается к своей первоначальной форме.

«Использование внешнего электрического потенциала позволяет легко программировать положение каждого трубчатого привода», — сказал первый автор Цигуан Хэ, доктор философии в области механики и аэрокосмической техники. студент инженерной школы Калифорнийского университета в Сан-Диего Джейкобс.
Объединение нескольких приводов вместе позволило инженерам создавать различные типы мягких роботов . Они построили непривязанного шагающего робота, используя четыре привода в качестве ног. Этот робот питается от небольшой литий-полимерной батареи на борту. Они также создали мягкий захват, используя три привода в качестве пальцев.
Каждый робот имеет встроенный микроконтроллер, в котором инженеры запрограммировали последовательность электрически управляемых движений для исполнительных механизмов. Это позволяет роботам двигаться независимо.
Сейчас команда работает над созданием мягких приводов, которые могут двигаться быстрее. Существующим актуаторам требуется около 30 секунд для полного изгиба и сжатия и до четырех минут для возврата к исходной форме. Это потому, что материалу требуется некоторое время, чтобы полностью нагреться и остыть. По его словам, конечная цель — создать приводы, которые могут сокращаться и расслабляться так же быстро, как человеческие мышцы.