Робототехники довольно хорошо умеют создавать роботов с мягкими гибкими телами. Для этого есть множество веских причин: роботы с присущей им уступчивостью могут быть более безопасными в работе, более устойчивыми к повреждениям и могут использовать множество уникальных методов передвижения. Проблема с мягкими роботами заключается в том, что вам часто приходится идти на компромиссы, когда дело доходит до их питания или приведения в движение, потому что эти вещи обычно включают добавление компонентов, которые вообще не являются мягкими, таких как батареи и исполнительные механизмы.
Примерно за последнюю неделю в новостях появились два новых метода передвижения мягких роботов: один из них использует внешние магнитные поля, а другой — электрическое поле для питания махающих плавников.
Этот роботизированный луч, разработанный в Чжэцзянском университете в Ханчжоу, Китай, приводится в движение мягкими машущими крыльями, сделанными из диэлектрических эластомеров , которые изгибаются при подаче на них электричества. Диэлектрические эластомеры очень быстро реагируют на относительно большие движения, но для их работы требуется очень высокое напряжение (порядка 10 киловольт). Традиционно диэлектрические эластомеры покрывают изоляцией, но для этого водного применения исследователи просто погрузили все без изоляции, полагаясь на воду, которая действует как электрод и электрическое заземление.
Есть несколько других причин, по которым этот дизайн примечателен. Во-первых, он почти полностью прозрачен, при этом полностью прозрачны тело, плавники, хвост и мышцы эластомера. Эффект немного портится, когда вы добавляете электронику и батареи, необходимые для автономной работы, но примечателен тот факт, что он вообще может быть автономным: батарея емкостью 450 мАч, 3,7 В будет поддерживать его плавание при 1,1. сантиметров в секунду на твердые 3 часа 15 минут, и он может носить даже крошечную камеру. Максимальная непривязанная скорость составляет 6,4 см / с, и рыба-робот будет с радостью плавать в воде с температурой от чуть выше нуля до почти 75 ° C.
Общая эффективность этого робота сравнима с радужной форелью в том смысле, что форель длиной 25 см расходует около 0,03 Вт для движения со скоростью 10 см / с. Настоящая форель, конечно, может двигаться намного быстрее и динамичнее, но для роботов достижение этого биологического уровня эффективности гораздо важнее. Исследователи еще не готовы предложить какие-либо конкретные приложения для робота, поэтому, вероятно, лучше просто взглянуть на это как на доказательство того, что эти технологии работают, оставив практического робота для следующего поколения.
Тем временем в Университете штата Северная Каролина в Роли исследователи работали над более фундаментальной техникой срабатывания, которая потенциально может использоваться для мягких роботов. Они еще не совсем готовы к созданию роботов, но им удалось превратить полимерные пленки в мышцы, которые можно задействовать дистанционно с помощью магнитного поля. Исследователи ввели микрочастицы железа в жидкую полимерную смесь, а затем применили магнитное поле к слизи, заставляя микрочастицы выстраиваться в параллельные цепочки. Когда слизь была высушена и разрезана на полоски, цепи сохранялись, а когда к ним прикладывалось другое магнитное поле, цепи выравнивались по нему, таща полимер вместе с собой.
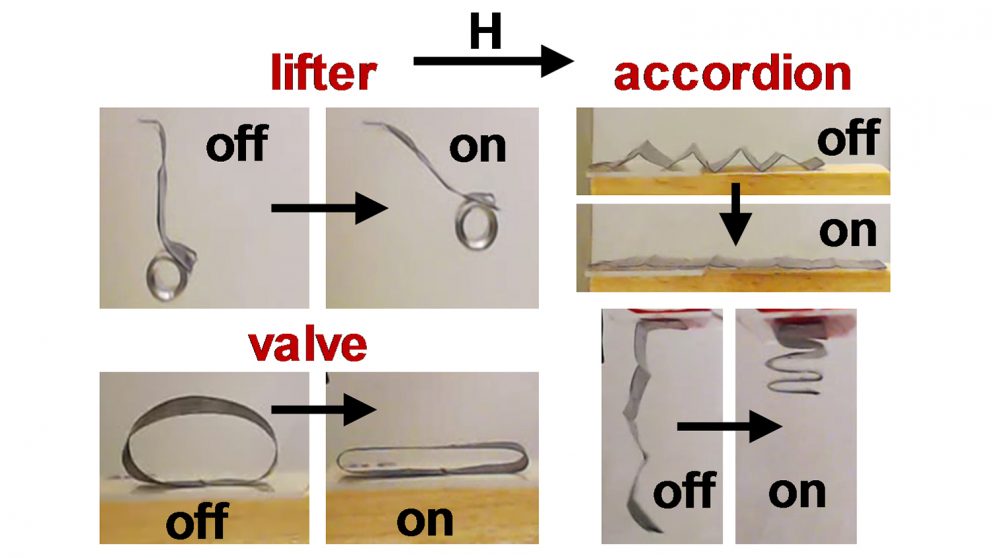
Изменяя силу и направление магнитного поля и настраивая структуру полимера, исследователи смогли создать набор потенциально весьма полезных мягких приводов, включая консоль, которая может поднимать вес в 50 раз больше собственного веса, расширяющуюся и сжимающаяся структура аккордеона, которая работает как мышца, и трубка с бегущей волной сжатия, которая функционирует как перистальтический насос.
Эти приводы кажутся дешевыми и простыми в изготовлении, и, хотя они ограничены только активизацией в ответ на внешнюю силу, они отлично работают с крошечными роботами внутри вашего тела или, возможно, в контексте развертываемых роботов или структур, которые не нужно постоянно активировать.