Теоретически, наличие дополнительных роботизированных конечностей звучит круто. С дополнительной рукой вы можете делать все, что угодно! Бросить сразу три фрисби! Съедать одновременно в три раза больше кусочков пиццы! Три больших пальца вверх! Эээ, другие вещи! Если серьезно, если мы собираемся разобраться в сверхштатных роботизированных конечностях, мы должны знать, для чего они действительно нужны людям. Лаборатория Гая Хоффмана в Корнелле имеет некоторый опыт наклеивания кусочков роботов на людей , и в статье, представленной на RO-MAN 2017, аспирант Вигнеш Ватсал выясняет, для каких задач третья рука может быть полезна.
Роботизированная рука, с которой экспериментируют исследователи Корнелла, представляет собой новую конструкцию, представляющую собой компромисс между дополнительной рукой, установленной на туловище, и дополнительными пальцами (или дополнительным большим пальцем), установленными на руке. Это небольшая короткая рука и захват, который вы носите на локте:
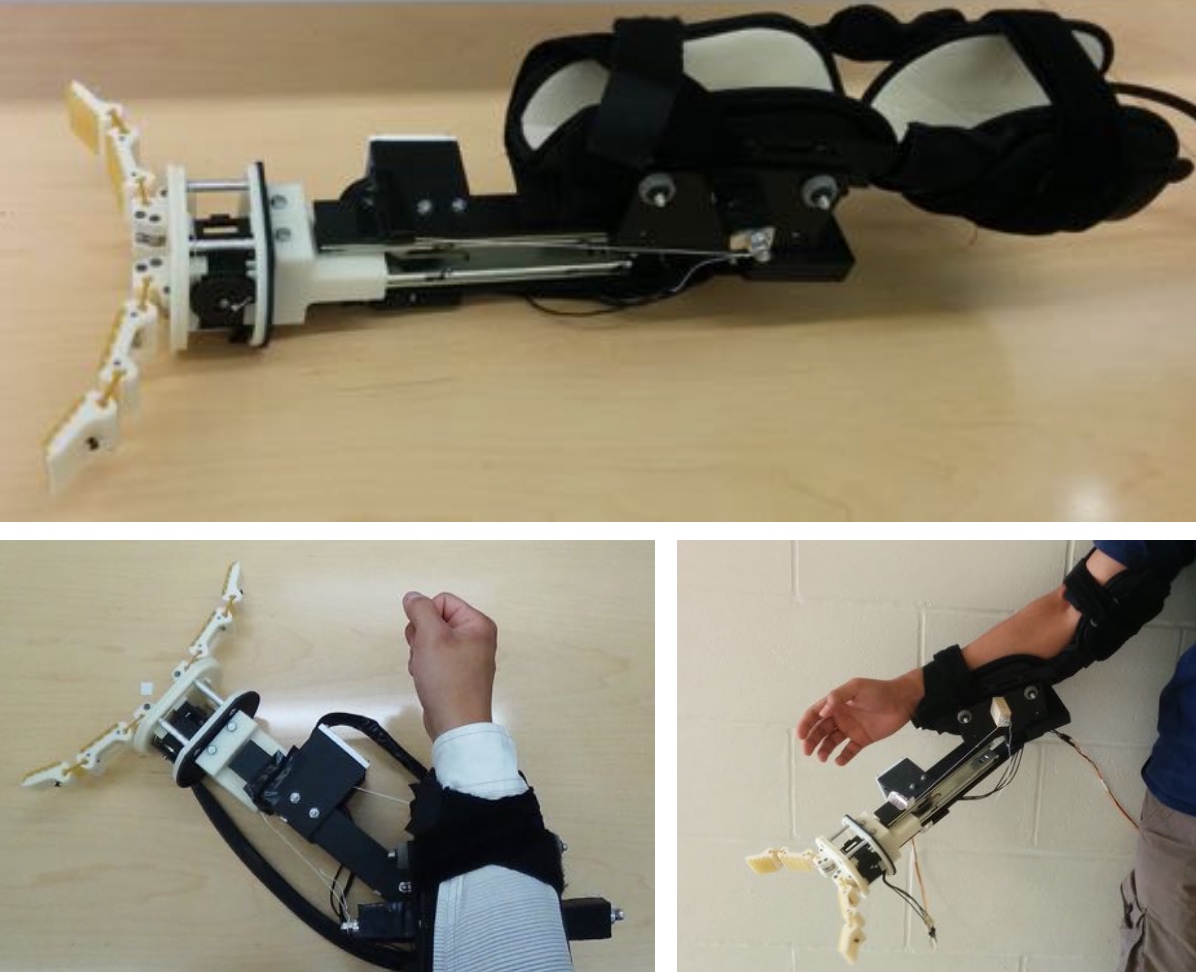
Рукоятка может поворачиваться (панорамироваться) на 120 градусов, а захват (основанный на Yale OpenHand ) выдвигается на 16 сантиметров. Весит около 2 кг. Обладая всего 3 степенями свободы, эта рука, очевидно, не предназначена для прямой замены возможностей любой из ваших существующих конечностей или пальцев, но она может помочь вам несколькими полезными способами. Чтобы выяснить, что это за способы, исследователи провели мозговой штурм и даже спросили мнение своих друзей в социальных сетях (что кажется невероятно рискованной идеей): «Для чего вы бы использовали носимую роботизированную третью руку?» Вот что придумала мудрость толпы:
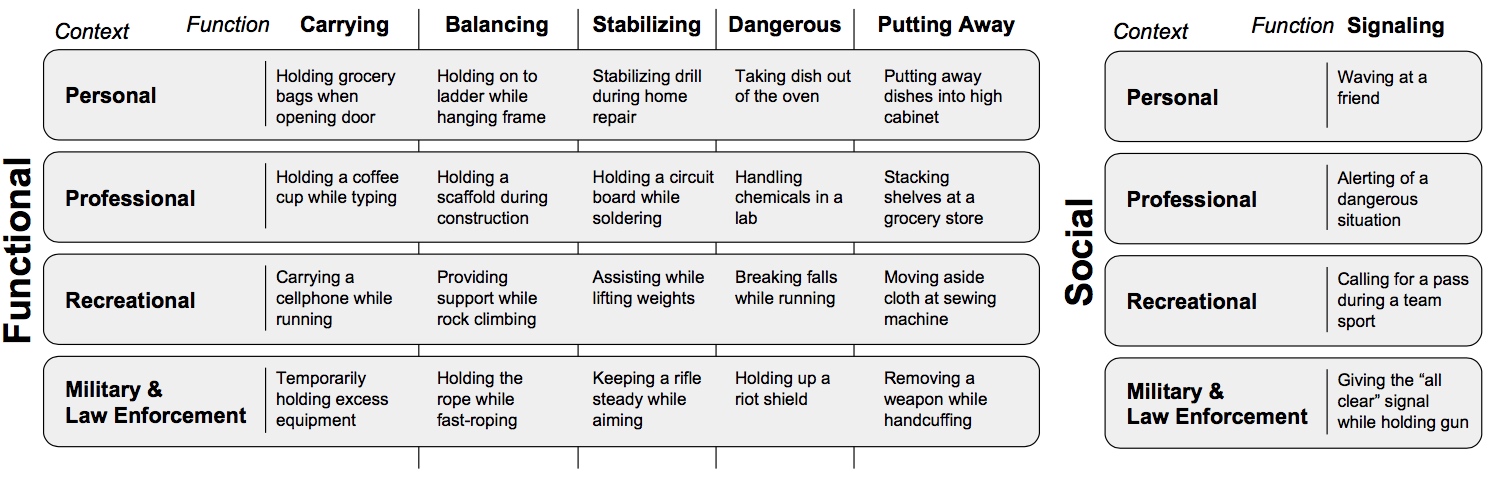
Помимо этих контекстов использования, исследователи также определили шесть функций использования руки:
- Перенос предметов и передача людей роботам.
- Уравновешивание пользователя за счет захвата и фиксации с помощью предметов в окружающей среде.
- Стабилизация объекта, который держит пользователь.
- Обращение с опасными предметами, такими как химикаты и электрические плиты.
- Убирать предметы вне досягаемости пользователя или пока руки заняты.
- Подавать сигналы, например, использовать роботизированную руку, чтобы жестом обратиться к коллеге с просьбой о помощи.
На основе этих данных онлайн-опрос был использован для уточнения конкретных конструктивных особенностей и требований руки:
Носимая роботизированная третья рука считалась более полезным в качестве функционального инструмента, чем для использования в социальных сетях. Более того, люди считали, что это более полезно в профессиональных и военных условиях и меньше всего в развлекательных контекстах. Точно так же респонденты, как правило, могли видеть, что используют третью руку больше для функционального использования, но выбирали личный контекст как более подходящий для собственного использования. В целом респонденты считают, что они менее склонны использовать такого робота по сравнению с тем, насколько полезным они считают его в целом.
К сожалению, это привело исследователей к выводу, что им следует придерживаться идеи дополнительной роботизированной руки как «ценного инструмента в профессиональной среде», а не «ценного инструмента в лиге трехруких фрисби». Ну что ж.
Команда, работающая над реконструкцией зданий в кампусе Корнельского университета, дала несколько советов в области строительства зданий, которые привели к исследованию удобства использования, в котором исследуются несколько различных приложений:
Вот несколько вещей, которые исследователи узнали:
- Вес робота сильно беспокоил участников. Пользователи часто изо всех сил пытались выполнить задание, и в одном случае им даже приходилось удерживать третью руку свободной рукой. Как правило, предплечье часто считалось нежелательным местом.
- Участники желали большей ловкости, чем им было предложено, особенно со стороны конечного эффектора. Конкретные DoF, которые желали участники, были сильно привязаны к области приложения. Участник, который работал в химических лабораториях, сказал, что было бы полезно, если бы третья рука могла «вычерпывать [небольшое] количество порошка с помощью небольшого шпателя».
- Многие участники хотели голосового управления роботизированной рукой, по крайней мере, с некоторой автономией: «Я хочу иметь возможность сказать ему что-то сделать, и он должен просто сделать это».
- В этом исследовании робот управлялся по разомкнутому контуру, то есть он шел по заданной траектории. Большинство участников отметили, что намерения руки не были ясны на протяжении всей траектории: «У меня не было чувства предупреждения [когда она собиралась] поднимать или бросать предметы».
- Когда речь идет о внешнем виде носимого устройства «третья рука», воображение пользователей часто подсказывалось вымышленными персонажами. В некоторых случаях участники предлагали моделировать устройство на существующих протезах. Наиболее заметно, однако, что участники сочли идею о том, что к их телам прикреплена еще одна человеческая рука, «немного жутко», особенно «если она будет выглядеть как человеческая кожа или плоть». Один участник сказал, что это будет «[…] страшно. Это было бы похоже на руку другого человека, но никого нет «.
Подобные исследования важны, потому что робототехника развивается настолько быстро, что слишком часто то, что мы можем делать с помощью технологий, опережает любую рациональную потребность в этих возможностях (я смотрю на вас, городские дроны для доставки ). Хотя идея третьей роботизированной руки может показаться потрясающей, когда люди начинают пытаться использовать их на практике, возникают всевозможные проблемы. Эти проблемы, конечно, не фатальны, но это означает, что исследователи будут разрабатывать серию прототипов на основе того, что они узнали, с конечной целью создания оборудования и программного обеспечения, которые пользователи сочтут ценными и будут счастливы. с участием.
Для получения более подробной информации мы поговорили с ведущим автором статьи, Vighnesh Vatsal, по электронной почте.
IEEE Spectrum: Как вы определились с конкретными функциями, которые нужно включить в конструкцию носимого робота?
Виннеш Ватсал: Во-первых, мы думали о человеческих улучшениях для конкретных функций робота. Мы хотели добавить способы движения, которые обычно не встречаются у людей, в отличие от протезов и экзоскелетов, которые заменяют или улучшают существующие человеческие способности. Отсюда горизонтальное панорамирование на изгибе и возможности увеличения длины. Затем мы хотели, чтобы рука была достаточно легкой, чтобы ее можно было легко перемещать, но при этом увеличивать досягаемость человека и позволять ему работать в большем количестве мест одновременно.
Почему вы выбрали именно строительство зданий? Можете ли вы рассказать о других областях, которые казались многообещающими?
Строительство здания объединяет множество факторов, которые мы ищем: повторяющиеся и требующие физической нагрузки задачи, сценарии, включающие задачи по перемещению и передаче между людьми, а также потенциальных пользователей, которые уже имеют опыт работы с машинами. Еще одна многообещающая профессиональная область, выявленная в ходе онлайн-опроса, заключалась в обращении с упаковками в супермаркетах и на складах, а также в их укладке и извлечении с полок. Поскольку сеанс мозгового штурма был открытым, ответы варьировались от «почесать собаке ухо, пока я читаю книгу», до «оказания дополнительной поддержки во время скалолазания» и всего остального.
Считаете ли вы, что выводы, сделанные в результате вашего исследования, отражают практический взгляд на то, что в настоящее время возможно с роботизированной системой? Что должно произойти, прежде чем я смогу купить себе один из них?
Некоторые конструктивные особенности, такие как уменьшенный вес, лучшая маневренность, а также голосовая или визуальная обратная связь, безусловно, могут быть реализованы с помощью существующих технологий. Другие последствия, такие как общая автономия и сотрудничество между пользователем и роботом, представляют собой открытые проблемы в теории управления и искусственном интеллекте, и они являются предметом нашего следующего этапа исследований.
Мы можем представить себе носимые устройства, предназначенные для конкретных приложений, которые скоро появятся в виде продуктов, но более универсальные устройства, вероятно, появятся гораздо дальше.
Над чем ты работаешь дальше?
Прямо сейчас мы изучаем биомеханические аспекты робота, чтобы повысить безопасность и эргономику. В то же время мы работаем над планировщиками пути и контроллерами, которые могут обрабатывать нарушения в плане движения робота, вызванные их владельцем. Мы также пытаемся научить робота выполнять задачи, связанные с совместной сборкой или очисткой.