Внезапный, трагический сигнал тревоги: именно так роботы видят ядерную катастрофу на АЭС Фукусима-дайити, вызванную мощным землетрясением и цунами в Японии в 2011 году. В сообщениях после аварии описывалось, как высокий уровень радиации препятствовал попыткам рабочих осуществить срочные меры, такие как клапаны рабочего давления. Это была идеальная миссия для робота, но ни в Японии, ни где-либо еще не было возможности его осуществить. Фукусима заставила многих из нас в сообществе робототехники понять, что нам нужно вывести нашу технологию из лаборатории в мир.
Роботы реагирования на стихийные бедствия добились значительного прогресса со времен Фукусимы. Исследовательские группы по всему миру продемонстрировали беспилотные наземные транспортные средства, которые могут проезжать по обломкам, роботизированные змеи, которые могут протискиваться через узкие промежутки, и беспилотники, которые могут наносить на карту место сверху. Исследователи также создают роботов-гуманоидов, которые могут обследовать повреждения и выполнять такие важные задачи, как доступ к панелям приборов или транспортировка оборудования для оказания первой помощи.
Но, несмотря на достигнутые успехи, создание роботов с одинаковыми навыками управления и принятия решений для аварийных работников остается сложной задачей. Чтобы открыть тяжелую дверь, разрядить огнетушитель и выполнить другую простую, но трудную работу, требуется уровень координации, который еще предстоит освоить роботам.
Одним из способов компенсации этого ограничения является использование телеоперации — наличие оператора-человека, который дистанционно управляет роботом, либо непрерывно, либо во время выполнения определенных задач, чтобы помочь ему достичь большего, чем он мог бы самостоятельно.
Телеоперативные роботы уже давно используются в промышленных, аэрокосмических и подводных условиях. Совсем недавно исследователи экспериментировали с системами захвата движения для передачи движений человека роботу-гуманоиду в режиме реального времени: вы машете руками, а робот имитирует ваши жесты. Для полного погружения в глаза специальные очки позволяют оператору видеть то, что робот видит через свои камеры, а тактильный жилет и перчатки могут дать тактильные ощущения телу оператора.
В лаборатории MIT Biomimetic Robotics Lab наша группа продвигает слияние человека и машины еще больше, надеясь ускорить разработку практических роботов-катастроф. При поддержке Агентства перспективных исследовательских проектов в области обороны(DARPA), мы создаем телеоботическую систему, которая состоит из двух частей: гуманоида, способного к ловкому, динамическому поведению, и нового вида двустороннего интерфейса человек-машина, который отправляет ваши движения роботу и движения робота вам. Поэтому, если робот наступает на обломки и начинает терять равновесие, оператор чувствует ту же нестабильность и инстинктивно реагирует, чтобы не упасть. Затем мы фиксируем этот физический ответ и отправляем его обратно роботу, что также помогает избежать падения. Посредством этой связи человек-робот робот может использовать врожденные моторные навыки оператора и доли секунды, чтобы удержаться на ногах.
Можно сказать, что мы помещаем человеческий мозг в машину.
Будущие роботы-катастрофы в идеале будут иметь большую автономию. Когда-нибудь мы надеемся, что сможем отправить робота в горящее здание для самостоятельного поиска жертв или развернуть робота на поврежденном промышленном объекте и попросить его определить, какой клапан ему необходимо отключить. Мы не достигли такого уровня возможностей. Отсюда растущий интерес к телеоперации.
DARPA Robotics вызов в Соединенных Штатах и Япония Impact Крутого Robotics Challenge , является один из последних усилий, которые продемонстрировали возможности teleoperation. Одна из причин, по которой люди попадают в круговорот, — непредсказуемая природа сцены бедствия. Навигация в этих хаотических средах требует высокой степени адаптируемости, которой современные алгоритмы искусственного интеллекта пока не могут достичь.
Например, если автономный робот встречает дверную ручку, но не может найти совпадения в своей базе данных дверных ручек, миссия не выполняется. Если робот застревает в руке и не знает, как освободить себя, миссия проваливается. С другой стороны, люди могут легко справляться с такими ситуациями: мы можем адаптироваться и учиться на лету, и мы делаем это ежедневно. Мы можем выявлять различия в формах объектов, справляться с плохой видимостью и даже выяснять, как использовать новый инструмент на месте.
То же самое касается наших моторных навыков. Подумайте о беге с тяжелым рюкзаком. Вы можете бегать медленнее или не так далеко, как вы бы без лишнего веса, но вы все равно можете выполнить задачу. Наши тела могут адаптироваться к новой динамике с удивительной легкостью.
Система телеоперации, которую мы разрабатываем, не предназначена для замены автономных контроллеров, которые используют роботы на ножках для самобаланса и выполнения других задач. Мы по-прежнему обеспечиваем наших роботов как можно большей автономией. Но, связывая робота с человеком, мы пользуемся преимуществом обоих миров: выносливостью и силой робота в дополнение к универсальности и восприятию человека.
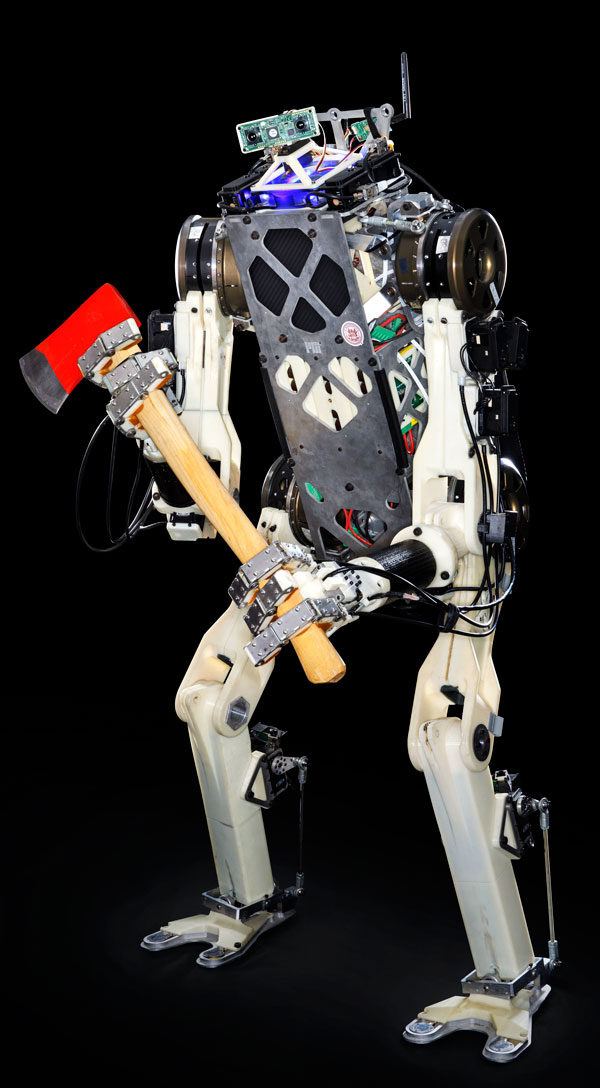
Наша лаборатория долго изучала, как биологические системы могут вдохновлять на разработку более совершенных машин. Конкретным ограничением существующих роботов является их неспособность выполнять то, что мы называем силовыми манипуляциями — напряженные подвиги, такие как выбивание куска бетона с пути или раскачивание топора в дверь. Большинство роботов предназначены для более тонких и точных движений и нежного контакта.
Мы разработали нашего гуманоидного робота под названием HERMES (для высокоэффективных роботизированных механизмов и электромеханических систем) специально для этого типа тяжелых манипуляций. Робот относительно легкий — весом в 45 килограмм — и при этом сильный и крепкий. Его тело составляет около 90 процентов от размера среднего человека, что достаточно велико, чтобы позволить ему естественным образом маневрировать в человеческой среде.
Вместо того чтобы использовать обычные двигатели постоянного тока, мы создали собственные приводы для питания суставов HERMES, опираясь на многолетний опыт работы с нашей платформой Cheetah , роботом-четвероногим, способным на взрывные движения, такие как бег на короткие дистанции и прыжки. Приводы включают в себя бесщеточные двигатели постоянного тока, соединенные с планетарной коробкой передач — так называемые, потому что три «планетарные» шестерни вращаются вокруг «солнечной» шестерни — и они могут генерировать огромное количество крутящего момента для своего веса. Плечи и бедра робота приводятся в действие непосредственно, а его колени и локти приводятся в движение металлическими стержнями, соединенными с приводами. Это делает ГЕРМЕС менее жестким, чем другие гуманоиды, способные поглощать механические удары без разрушения зубчатых колес.
Когда мы впервые включили ГЕРМЕС, это была всего лишь пара ног. Робот не мог даже стоять сам по себе, поэтому мы подвесили его на подвеске. В качестве простого теста мы запрограммировали левую ногу на удар. Мы схватили первое, что нашли в лаборатории — пластиковый контейнер для мусора — и поместили его перед роботом. Было приятно видеть, как ГЕРМЕС пинает мусорное ведро через всю комнату .
Интерфейс «человек-машина», который мы создали для управления HERMES, отличается от обычных тем, что он использует рефлексы оператора для улучшения устойчивости робота. Мы называем это интерфейсом обратной связи баланса, или BFI.
BFI потребовались месяцы и многократные итерации, чтобы развиться. Первоначальная концепция имела некоторое сходство с костюмами виртуальной реальности для всего тела, показанными в фильме Стивена Спилберга « Готовый игрок один» 2018 года . Этот дизайн никогда не покидал чертежную доску. Мы обнаружили, что физическое отслеживание и перемещение тела человека — с более чем 200 костями и 600 мышцами — не простая задача, и поэтому мы решили начать с более простой системы.
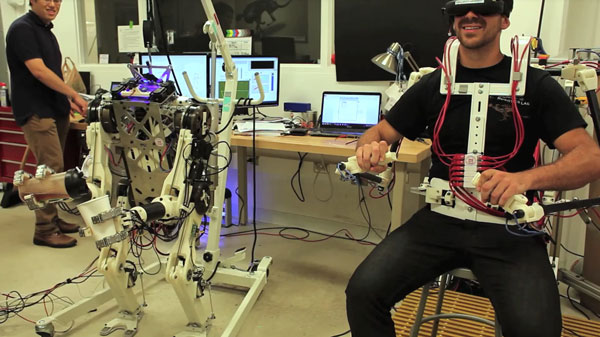
Для работы с HERMES оператор стоит на квадратной платформе, около 90 сантиметров сбоку. Тензодатчики измеряют силы на поверхности платформы, поэтому мы знаем, где ноги оператора толкают вниз. Набор связей прикрепляется к конечностям и пояснице оператора (в основном, к центру масс человеческого тела) и использует вращающиеся датчики для точного измерения смещений с точностью до сантиметра. Но некоторые из этих связей предназначены не только для восприятия: в них также есть двигатели для приложения усилий и крутящих моментов к туловищу оператора. Если вы привязываете себя к BFI, эти связи могут прикладывать до 80 ньютонов силы к вашему телу, что достаточно, чтобы дать вам хороший толчок.
Мы настроили два отдельных компьютера для управления HERMES и BFI. Каждый компьютер имеет свой собственный цикл управления, но обе стороны постоянно обмениваются данными. В начале каждого цикла HERMES собирает данные о своем положении и сравнивает их с данными, полученными от BFI о положении оператора. Основываясь на различии данных, робот настраивает свои исполнительные механизмы и затем немедленно отправляет новые данные положения в BFI. Затем BFI выполняет аналогичный цикл управления для регулировки положения оператора. Этот процесс повторяется 1000 раз в секунду.
Чтобы обе стороны могли работать с такими высокими скоростями, нам пришлось сжать информацию, которой они делятся. Например, вместо того, чтобы отправлять подробное представление о положении оператора, BFI отправляет только положение центра масс человека и относительное положение каждой руки и ноги. Затем компьютер робота масштабирует эти измерения пропорционально размерам HERMES, которые воспроизводят эту исходную позу. Как и в любом другом двустороннем телеоперационном контуре, эта связь может вызывать колебания или нестабильность. Мы минимизировали это путем точной настройки параметров масштабирования, которые отображают позы человека и робота.
Чтобы проверить BFI, один из нас ( Рамос ) вызвался быть оператором. В конце концов, если вы спроектировали основные части системы, вы, вероятно, лучше всего подготовлены для ее отладки.
В одном из первых экспериментов мы протестировали алгоритм ранней балансировки для HERMES, чтобы увидеть, как будут вести себя человек и робот, когда связаны друг с другом. В тесте один из исследователей использовал резиновый молоток, чтобы ударить ГЕРМЕС по его верхней части тела. С каждым ударом BFI оказывал аналогичный толчок на Рамоса, который рефлексивно перемещал свое тело, чтобы восстановить равновесие, заставляя робота также поймать себя.
До этого момента ГЕРМЕС был всего лишь парой ног и туловища, но в итоге мы завершили остальную часть его тела. Мы создали руки, в которых используются те же приводы, что и в ногах и руках, из деталей с 3D-печатью, усиленных углеродным волокном. Голова оснащена стереокамерой для потоковой передачи видео на гарнитуру, которую носит оператор. Мы также добавили каску, просто потому что.
В другом раунде экспериментов мы пробили ГЕРМЕСа через гипсокартон, взмахнули топором по доске и, под наблюдением местной пожарной части, выпустили контролируемое пламя с помощью огнетушителя. Роботам для бедствий понадобится больше, чем просто грубая сила, поэтому ГЕРМЕС и Рамос также выполняли задачи, требующие большей ловкости, такие как наливание воды из кувшина в чашку .
В каждом случае, когда оператор симулировал выполнение задачи, будучи привязанным к BFI, мы наблюдали, насколько хорошо робот отразил эти действия. Мы также рассмотрели сценарии, в которых реакции оператора могут помочь роботу больше всего. Например, когда ГЕРМЕС пробил гипсокартон, его туловище отскочило назад. Почти сразу же соответствующая сила толкнула оператора, который рефлексивно наклонился вперед, помогая ГЕРМЕСу отрегулировать свое положение.
Мы были готовы к дополнительным испытаниям, но мы поняли, что HERMES слишком велик и мощен для многих экспериментов, которые мы хотели провести. Хотя машина человеческого масштаба позволяет вам выполнять реалистичные задачи, она также требует много времени для передвижения и требует много мер предосторожности — она владеет топором! Попытка более динамичного поведения или даже ходьба оказалась трудной. Мы решили, что ГЕРМЕСУ нужен маленький брат.
Little HERMES — это уменьшенная версия HERMES. Как и его старший брат, он использует нестандартные приводы с высоким крутящим моментом, которые устанавливаются ближе к корпусу , чем к ногам. Эта конфигурация позволяет ногам качаться намного быстрее. Для более компактной конструкции мы сократили число осей движения — или степеней свободы, на языке робота — с шести до трех на конечность, и мы заменили оригинальные ножки с двумя пальцами на простые резиновые сферы, каждая из которых имела три датчик силы оси заправлен внутрь.

Подключение BFI к Little HERMES требовало корректировок. Существует большая разница в масштабе между взрослым человеком и этим меньшим роботом, и когда мы попытались связать их движения напрямую — отображение положения коленей человека и колен робота и т. Д. — это привело к резким движениям. Нам нужна была другая математическая модель для посредничества между двумя системами. Модель, которую мы придумали, имеет параметры треков, такие как контактные силы на землю и центр масс оператора. Он фиксирует своего рода «контур» предполагаемого движения оператора, которое Little HERMES может выполнить.
В одном эксперименте у нас был шаг оператора, сначала медленно, а затем быстрее. Мы были рады видеть, как Маленький ГЕРМЕС марширует точно так же. Когда оператор прыгнул, Маленький ГЕРМЕС тоже прыгнул.
В последовательности фотографий, которые мы сделали, вы можете на мгновение увидеть человека и робота в воздухе. Мы также поместили куски дерева под ноги робота в качестве препятствий, и контроллер робота смог удержать робота от падения.
Многое из этого было все еще предварительной работой, и Литл ГЕРМЕС не мог свободно стоять или ходить. Опорный столб, прикрепленный к его спине, не позволил ему опрокинуться вперед. В какой-то момент мы хотели бы продолжить разработку робота и сделать его свободным, чтобы бродить по лаборатории и, возможно, даже на улице, как мы делали с Cheetah и Mini Cheetah (да, у него тоже есть маленький брат).
Наши следующие шаги включают в себя решение множества проблем. Одним из них является умственная усталость, которую оператор испытывает после использования BFI в течение длительных периодов времени или для задач, которые требуют большой концентрации. Наши эксперименты показывают, что когда вам приходится управлять не только своим телом, но и машиной, ваш мозг быстро утомляется. Эффект особенно выражен для задач тонкой манипуляции, таких как налив воды в чашку. После трехкратного повторения эксперимента оператору пришлось сделать перерыв.
Решение здесь состоит в том, чтобы оператор и машина разделяли ответственность за стабилизацию робота. Если HERMES выполняет задачу, которая требует от оператора более сознательных усилий, оператор также не должен держать робота сбалансированным; автономный контроллер может взять на себя баланс робота. Один из способов выявления таких сценариев — отслеживание взгляда оператора. Фиксированный взгляд указывает на умственную задачу, и в таких случаях должен включиться автономный режим балансировки.
Еще одно препятствие для нашей системы или любой телеуправляемой системы — это задержки передачи. Представьте, что вы управляете роботом удаленно, и между вашими командами и ответами робота существует задержка в 1 секунду. Возможно, вы все еще сможете дистанционно управлять им, но если задержка станет больше, вы можете почувствовать себя дезориентированным и неспособным выполнять манипуляции. Наш план состоит в том, чтобы полагаться на новые беспроводные технологии, такие как 5G, которые обеспечивают как низкую задержку, так и высокую пропускную способность.
Наконец, есть несколько смелых новых дизайнов, которые мы хотели бы изучить. Хотя HERMES и Little HERMES — двуногие роботы, нет реальной причины, по которой робот-спасатель должен быть двуногим. Одна многообещающая возможность — это машина, которая будет ходить на четырех ногах, чтобы пересечь сложную местность, а затем встать на задние конечности для выполнения манипуляционных задач, как это делают некоторые виды приматов.
Наше долгосрочное видение состоит в том, чтобы объединить роботов на ножках, которые мы разработали в нашей лаборатории: Cheetah и HERMES. В результате получился бы быстро движущийся четвероногий робот, который мог бы самостоятельно врезаться в место катастрофы, а затем превратиться в двуногого робота, который мог бы позаимствовать навыки и рефлексы опытного первого реагирующего. Мы верим, что подобные технологии помогут аварийным работникам выполнять свою работу лучше и безопаснее.
Однажды, надеюсь, скоро, роботы будут готовы при вызове.
Эта статья появляется в выпуске за июнь 2019 года как «Мозг в машине».