Люди от природы способны выполнять сложные движения руками за счет сочленения своей эндоскелетной структуры. Эти движения становятся возможными благодаря связкам и сухожилиям, которые эластично связаны с довольно жесткой структурой кости.
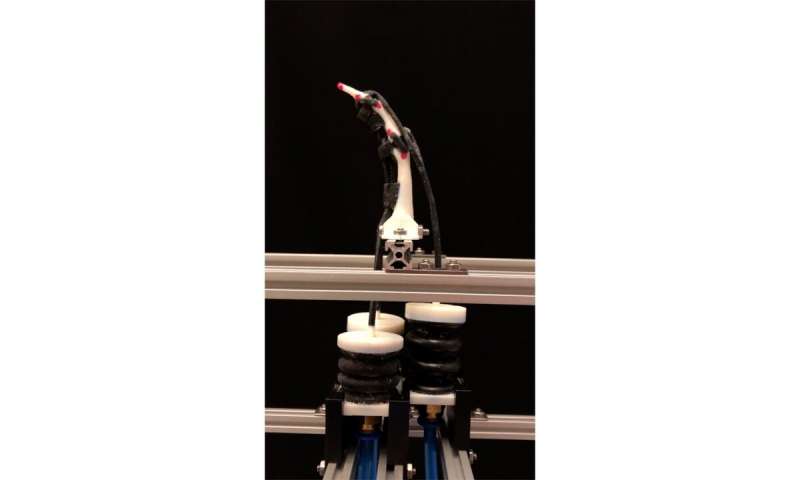
Исследователи из Калифорнийского университета в Санта-Круз и Университета Рицумейкан в Японии недавно разработали и изготовили роботизированный палец, вдохновленный структурой эндоскелета человека . Этот биомиметический роботизированный палец, представленный в этом году на Международной конференции по повсеместным роботам и окружающему интеллекту (URAI), был собран с использованием мультимедийного 3-D принтера.
«Развитие роботизированной руки , которая имеет твердые и мягкие компоненты, так же , как рука человека, является темой исследований , которые я хотел исследовать в течение многих лет,» сказал Марьям Tebyani, один из исследователей, проводивших исследование TechXplore . «Комбинирование эластичных и неэластичных материалов позволит устранить превалирующий пробел в робототехнике, когда гибкие системы могут иметь проблемы с тяжелыми объектами, в то время как жесткие платформы могут требовать сложного изготовления или контроля для достижения ловкости, сравнимой с человеческой рукой».
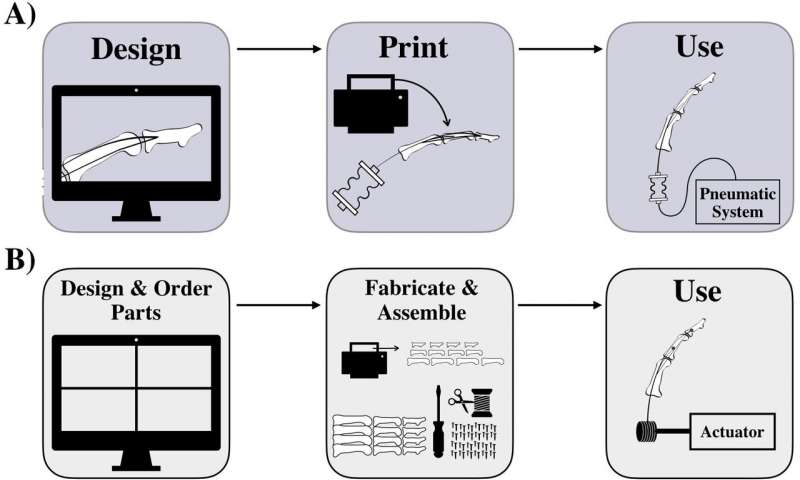
Основная цель недавней работы Тебяни и ее коллег заключалась в создании руки робота, вдохновленной природными системами. Однако исследователи хотели сосредоточить большую часть своих усилий на создании искусственной руки, а не на ее изготовлении и сборке. Поэтому они решили воспользоваться преимуществами современных методов трехмерной печати, которые могут упростить и ускорить общий процесс производства прототипов.
«Использование трехмерной печати из нескольких материалов в процессе проектирования дало нам свободу в проектировании трехмерных структур сухожилий и связок, а также позволило нам создать робота с тросовым приводом за один отпечаток», — пояснил Тебяни. «Вязкоупругие печатные материалы обладают той механической гибкостью, которую мы искали, поскольку они позволяют создавать действительно интересные пассивные модели поведения. По сути, этот процесс позволяет использовать механическую конструкцию для программирования определенных функций робота».
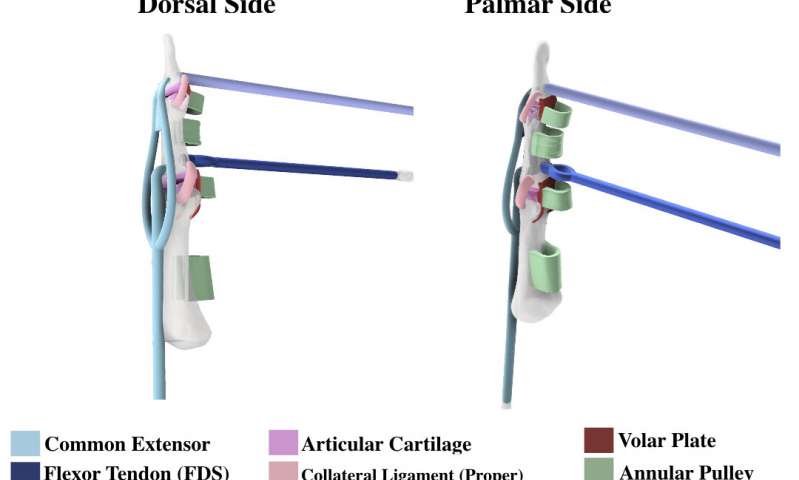
Роботизированный палец, разработанный исследователями, имеет геометрию кости, структуры связок, искусственные мышцы и вязкоупругие сухожилия, которые напоминают человеческие. Все эти компоненты были синтезированы как единая деталь с использованием мультимедийного трехмерного принтера. Тебяни и ее коллеги также разработали модель пальца, используя популярный движок физического моделирования под названием MuJoCo. Это позволило им сравнить результаты, достигнутые их роботизированным пальцем в моделировании, с результатами, полученными на печатном прототипе пальца в реальных условиях.
Результаты, полученные исследователями в своих экспериментах, являются многообещающими, подчеркивая огромный потенциал объединения методов трехмерной печати и моделирования для создания сложных робототехнических систем и получения большего контроля над этими системами. Используемые ими методы в конечном итоге позволили им объединить использование вязкоупругих материалов, повсеместно используемых в мягкой робототехнике, и более традиционных методов робототехники, что привело к более точному воспроизведению эндоскелетной структуры человека.
-
Предоставлено: Тебяни и др. -

Предоставлено: Тебяни и др. -
Предоставлено: Тебяни и др. -
«Предложенный нами процесс проектирования позволяет нам масштабировать геометрию и свойства материалов каждого элемента в наших роботизированных конструкциях, чтобы они соответствовали индивидуальным людям, и быстро создавать эти прототипы посредством автономной сборки», — сказал Тебяни. «Современные протезы и телеуправляемая робототехника достигли значительных успехов в взаимодействии с людьми. Мы пытаемся помочь этому прогрессу, создавая платформы, которые являются естественным продолжением человеческого тела, а настраиваемые модели являются неотъемлемой частью достижения этого «.
В будущем процесс проектирования и изготовления, используемый этой группой исследователей, может быть применен для создания нескольких других роботизированных структур, вдохновленных биологией, таких как другие конечности, созданные человеком или животными. Кроме того, разработанный ими биомиметический палец может быть использован для создания руки робота, которую затем можно будет прикрепить как к существующим, так и к новым роботам.

«В настоящее время мы работаем над распространением этой конструкции на всю руку и запястье, чтобы можно было манипулировать объектами», — сказал Тебяни. «У нас также есть планы по разработке конструкций, основанных на вариации представленного метода изготовления, чтобы эти системы можно было реализовать с помощью трехмерных принтеров, более доступных для других робототехников».