Медузы на 95% состоят из воды, что делает их одними из самых прозрачных и деликатных животных на планете. Но оставшиеся 5% из них привели к важным научным открытиям, таким как зеленый флуоресцентный белок (GFP), который в настоящее время широко используется учеными для изучения экспрессии генов, и изменение жизненного цикла, которое могло бы стать ключом к борьбе со старением. Медузы могут очень хорошо укрывать другие, потенциально изменяющие жизнь секреты, но сложность их сбора сильно ограничила изучение такой «забытой фауны». Инструменты отбора проб, доступные морским биологам на дистанционно управляемых транспортных средствах (ROV), были в значительной степени разработаны для морской нефтегазовой промышленности и намного лучше приспособлены для захвата и манипулирования камнями и тяжелым оборудованием, чем желе, часто разбивая их на части в попытках захватить их.
Теперь новая технология, разработанная исследователями из Гарвардского института биологического вдохновения, Школы инженерных и прикладных наук им. Джона А. Полсона (SEAS) и Барухского колледжа в CUNY, предлагает новое решение этой проблемы в форме ультра- мягкий подводный захват, который использует гидравлическое давление, чтобы аккуратно, но крепко обернуть пальцы, похожие на феттучини, вокруг одной медузы, а затем отпустить, не причиняя вреда. Захват описан в новой статье, опубликованной в Science Robotics .
«Наш ультрамягкий захват представляет собой явное улучшение по сравнению с существующими глубоководными пробоотборными устройствами для желе и других существ с мягким телом, которые практически невозможно собрать без изменений», — сказала первый автор Нина Синатра, доктор философии, бывший аспирант в Институте Wyss, который сейчас является инженером-механиком и инженером материалов в Google. «Эта технология также может быть расширена для совершенствования методов подводного анализа и проведения всестороннего изучения экологических и генетических особенностей морских организмов, не вынимая их из воды».
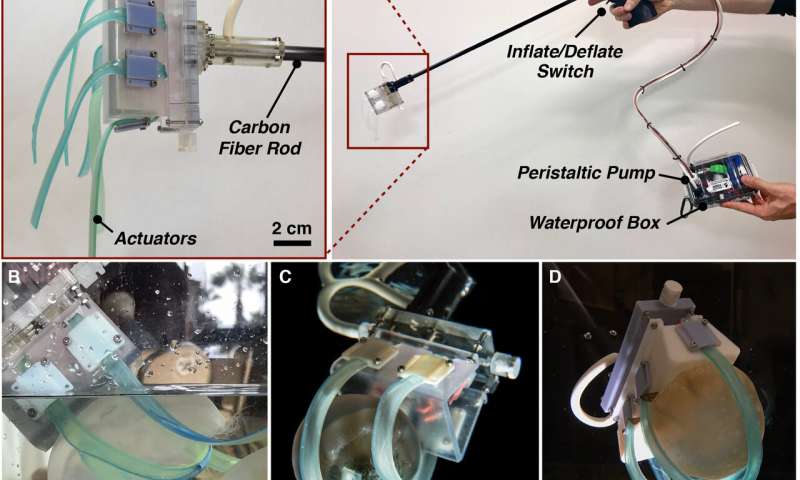
Шесть «пальцев» захвата состоят из тонких плоских силиконовых полосок с полым каналом внутри, соединенным со слоем гибких, но более жестких полимерных нановолокон. Пальцы прикреплены к прямоугольной пластиковой «ладони» с трехмерной печатью и, когда их каналы заполнены водой, скручиваются в направлении стороны, покрытой нановолокном. Каждый из пальцев оказывает чрезвычайно низкое давление — около 0,0455 кПа или менее одной десятой от давления века человека на их глаз. Напротив, современные современные мягкие морские захваты, которые используются для поимки деликатных, но более крепких животных, чем медузы, требуют около 1 кПа.
Исследователи установили свой ультрамягкий захват на специально созданное ручное устройство и проверили его способность удерживать искусственную силиконовую медузу в резервуаре с водой, чтобы определить положение и точность, необходимые для успешного сбора образца, а также оптимальный угол и скорость, с которой можно поймать медузу. Затем они перешли к реальному месту в Аквариуме Новой Англии, где использовали захваты, чтобы захватить желе из лунного жира, желеобразное желе и пятнистое желе, размером с мяч для гольфа.
Захват мог успешно удерживать каждую медузу на ладони устройства, и медуза не могла вырваться из хватки пальцев до тех пор, пока у держателя не было сброшено давление. После освобождения у медузы не было никаких признаков стресса или других неблагоприятных эффектов, и пальцы могли открываться и закрываться примерно 100 раз, прежде чем появились признаки износа.
«Морские биологи долгое время ждали инструмента, который воспроизводит мягкость человеческих рук при взаимодействии с такими деликатными животными, как медузы, из недоступной среды», — сказал соавтор Дэвид Грубер, доктор философии, профессор биологии и Наука об окружающей среде в Baruch College, CUNY и National Geographic Explorer. «Этот захват является частью постоянно растущего мягкого роботизированного инструментария, который обещает сделать сбор подводных видов более простым и безопасным, что значительно улучшило бы темпы и качество исследований на животных, которые изучались в течение сотен лет, давая нам более полная картина сложных экосистем, из которых состоят наши океаны ».
Ультрамягкий захват — это последнее новшество в использовании мягкой робототехники для отбора проб под водой, постоянное сотрудничество между Грубером и главным преподавателем Wyss Founding Rob Rob, Ph.D. это привело к созданию вдохновленного оригами образца RAD и многофункциональных «мягких пальцев» для сбора разнообразных трудноуловимых организмов, включая кальмаров, осьминогов, губок, морских кнутов, кораллов и многое другое.
«Мягкая робототехника является идеальным решением для таких давних проблем, как эта, в самых разных областях, потому что она сочетает в себе программируемость и надежность традиционных роботов с беспрецедентной мягкостью благодаря гибким используемым материалам», — сказал Вуд, который является сотрудником компании. — руководитель платформы Soft Robotics Института Wyss, работающей на биоинспирации, профессор инженерных и прикладных наук Чарльз Ривер в SEAS и исследователь National Geographic.
Видео о лапшоподобных придатках подводного робота-захватчика, запечатлевшего живую медузу в аквариуме Новой Англии. Предоставлено: Синатра и др., Sci. Робот. 4, eaax5425 (2019)
Команда продолжает совершенствовать конструкцию ультрамягкого захвата и стремится проводить исследования, которые оценивают физиологическую реакцию медуз на удерживание захватом, чтобы более точно доказать, что они не вызывают стресс у животных. Вуд и Грубер также являются соучастниками проекта Океанского института Шмидта «Проектирование будущего» и будут дополнительно тестировать своих различных подводных роботов в предстоящей экспедиции на исследовательском корабле Falkor в 2020 году.
«В Институте Висса мы всегда спрашиваем:« Как мы можем сделать это лучше? » Я чрезвычайно впечатлен изобретательностью и нестандартным мышлением, которое Роб Вуд и его команда применили для решения реальной проблемы, которая существует в открытом океане, а не в лаборатории. Это может помочь значительно продвинуться вперед «Наука об океане», — сказал директор-основатель Института Висса Дональд Ингбер, доктор медицинских наук, профессор, который также является профессором по биологии сосудов Джуды Фолкман в Гарвардской медицинской школе, Программой биологии сосудов в Бостонской детской больнице и профессором биоинженерии в SEAS.