Поддержка дальних коммуникаций внутри шахты чрезвычайно сложна, поэтому команды DARPA SubT пробуют некоторые творческие подходы



Когда DARPA объявила о своем Subterground Challenge , агентство разработало комплексный список «элементов технических задач», которые, как вы знаете, будут особенно сложными. Одним из этих элементов были коммуникационные ограничения, которые, по мнению DARPA, должны быть «серьезными». «Возможно, это было преуменьшением, основываясь на том, что мы видим на туннельной трассе SubT — у команд было много проблем с постоянным общением со своими роботами на трассе.
Несмотря на то, что большинство команд уделяют как можно больше внимания автономии, им все равно приходится иметь дело с коммуникационными проблемами, потому что обнаружение артефактов не принесет вам никаких очков, если робот не сообщит о своем местонахождении обратно на базу до истечения времени. И если вашему роботу придется вернуться на базу, чтобы составить отчет, у него не хватит времени после обнаружения всего лишь нескольких артефактов .
Для этого нет волшебного решения, и это здорово, потому что команды придумали всевозможные фантастически креативные и уникальные стратегии. Мы обошли вокруг и спросили их об этом, когда вчера посетили туннельную трассу SubT в Питтсбурге.
Немного краткого контекста, который поможет вам понять проблему — роботы, как правило, справляются с этим на первых нескольких десятках метров сразу после входа в шахту . Однако, когда они поворачивают первый угол, они теряют беспроводное соединение с базовой станцией почти сразу, потому что радиоволны не проходят сквозь твердую скалу. И даже если роботам удается немного повесить сигнал, изгибы и повороты и огромные расстояния, которые должны пройти роботы (в идеале, сотни и сотни метров), означает, что просто невозможно поддерживать прямое соединение обратно на базу.
В большинстве команд для решения этой проблемы используется метод ячеистых сетей « робот-робот». Это означает, что сами роботы могут служить сетевыми узлами, и если один робот может связываться с базой, любой робот, с которым он может связываться, также может связываться назад. на базу — и так далее по длинной цепочке роботов, как вы можете управлять. Роботы должны перемещаться, чтобы выполнять свою работу, и у команд есть только ограниченное количество роботов, поэтому вот некоторые другие стратегии, которые команды используют, чтобы поддерживать связь.
Команда ПЛУТО
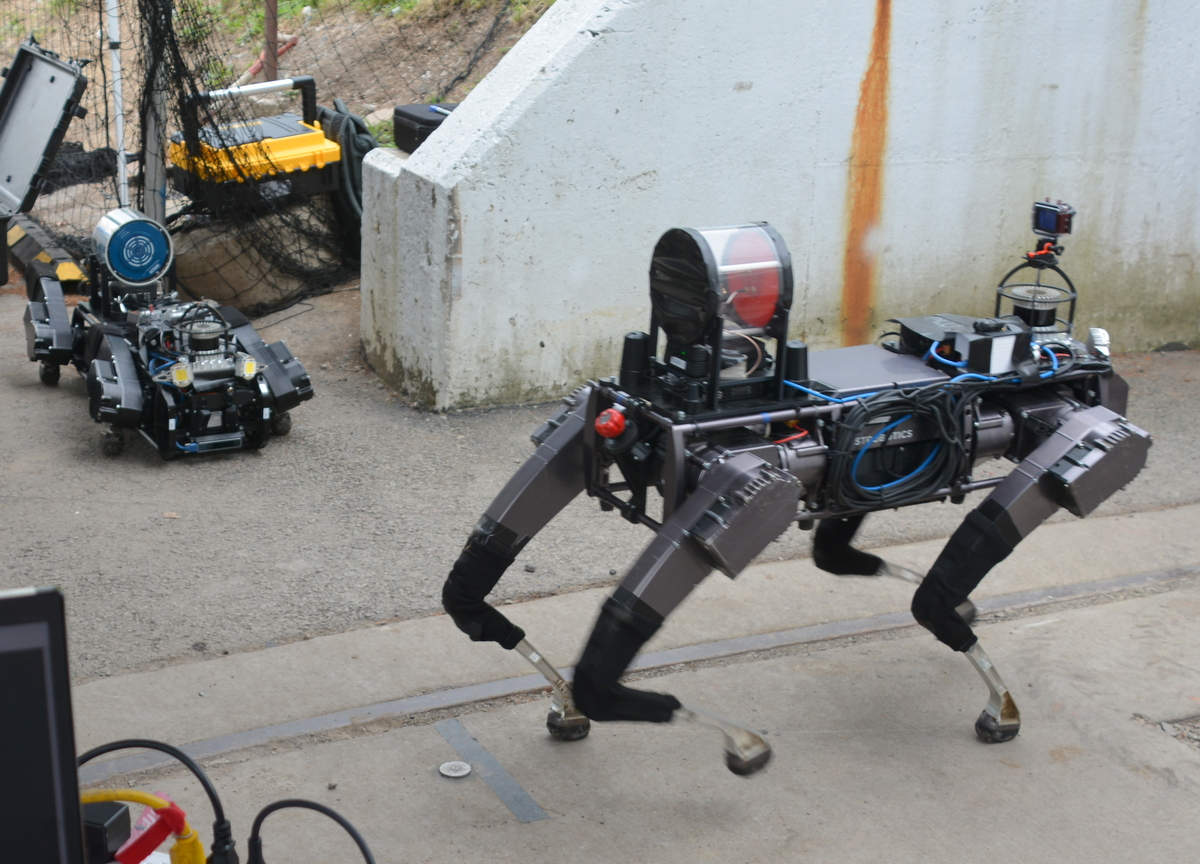
Это примерно так же просто, как и получается — Team PLUTO установила массивные дипольные антенны на торцы своих четвероногих Ghost Robotics Vision 60, что, по их опыту, повышает производительность связи на порядок. Команда подчеркивает автономность, и, как и многие другие команды, их роботы предназначены для работы в течение длительных периодов времени без каких-либо коммуникаций вообще, но им все равно необходимо сообщать о том, что они находили время от времени.
Team Explorer

Team Explorer, который в настоящее время лидирует (по многим показателям) среди обнаруженных артефактов, использует развертываемые сетевые узлы (вытащенные на полпути из защитного кожуха на рисунке выше), которые его роботы могут сбрасывать, когда сила сети начинает снижаться. Каждый робот может нести около 10 узлов в двух стойках, которые вы можете видеть, и в то время как узлы сбрасываются по команде удаленного оператора в данный момент, роботы в конечном итоге смогут самостоятельно решать, когда им нужно сбросить один из них. Команда также планирует уменьшить количество узлов вниз и улучшить механизм сбрасывания, который может застрять в грязи.
Команда CoSTAR

Идея развернутого сетевого узла была популярной, и команда CoSTAR (занявшая второе место по артефактам, обнаруженным в конце третьего дня) отправила несколько роботов, несущих узлы в нескольких различных конфигурациях.
Команда CERBERUS
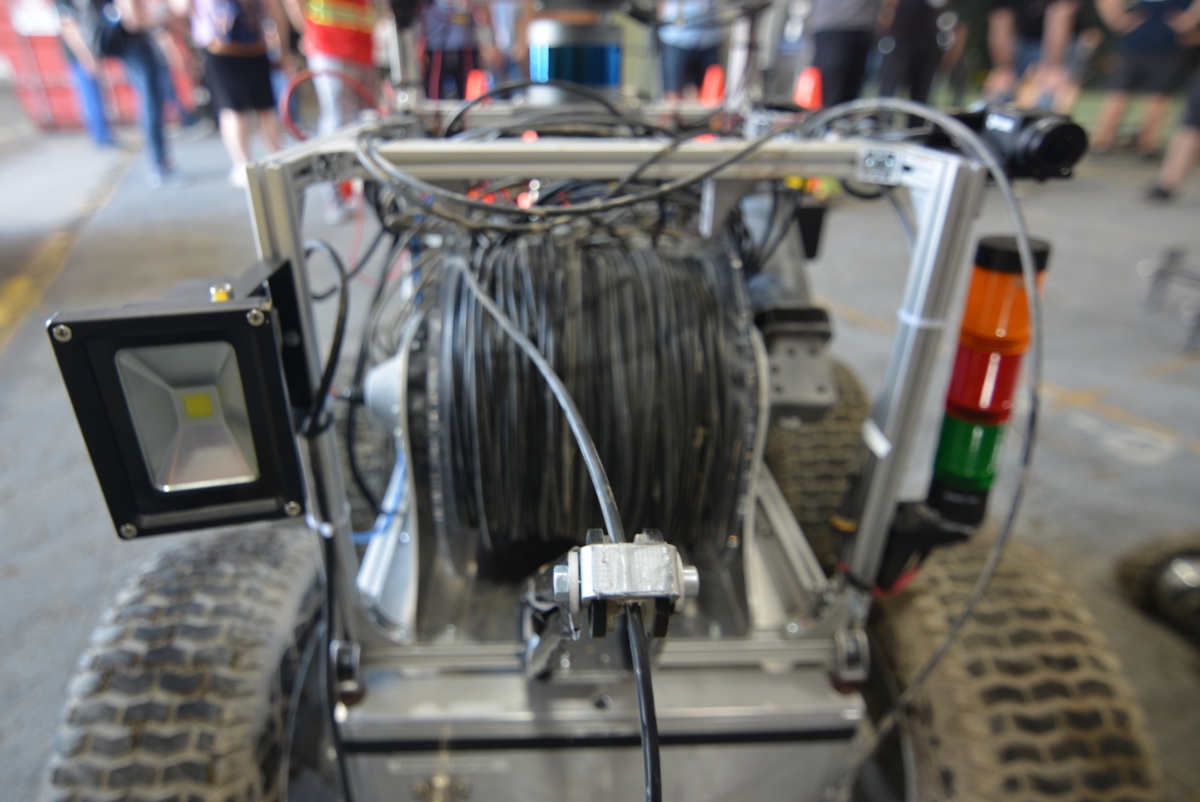
DARPA не слишком тонко предположила, что команды могут не захотеть полагаться на физическую привязь между базовой станцией и роботами («команды должны серьезно учитывать ограничения [на привязи], налагаемые крупномасштабными, потенциально динамическими, сложными средами», — говорит он. агентство), но команда CERBERUS не позволила этому напугать их. Они используют волоконно-оптический трос и специального робота связи с массивной антенной на нем, чтобы существенно расширить их базовую станцию вглубь шахты.
Трос, конечно, не достаточно длинный, чтобы исследовать всю шахту, и его нужно аккуратно обходить по углам, но даже если робот просто спускается до конца первого прохода и за первый угол, это Массовое улучшение.
Команда НГТУ
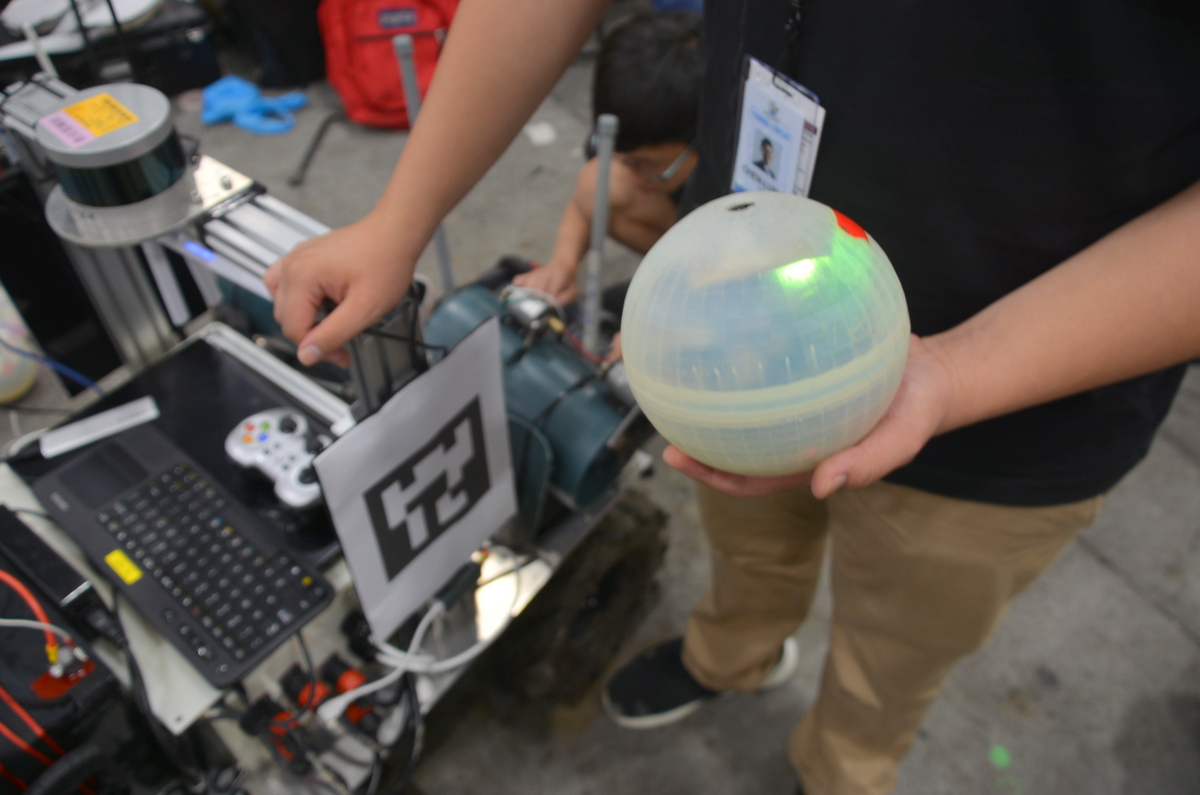
Это «якорные шары», которые роботы Team NCTU могут развернуть как узлы ячеистой сети, но они также используются в качестве активных ориентиров, помогающих с локализацией SLAM. Они взвешены внизу, так что после падения они перестают вращаться с камерой, указывающей на потолок, и робот может затем сопоставить изображение с камеры Anchorball со своей собственной внутренней картой.
После небольшой проблемы со связью Team NCTU решила, что им нужно немного улучшить свою систему, и вчера они развернули свой собственный тип привязи.

Если это выглядит как маршрутизатор, завернутый в пластиковый пакет, соединенный с очень длинным шнуром Ethernet, то вы его прибили. Команда разместила маршрутизатор на роботе, выпустила кабель от базовой станции, когда робот въехал в шахту, а затем просто подтянула кабель, чтобы вытащить маршрутизатор из робота на землю, как только робот достигнет достаточно большого расстояния. развернуть маршрутизатор там, где команда хотела этого.
Команда CSIRO Data61
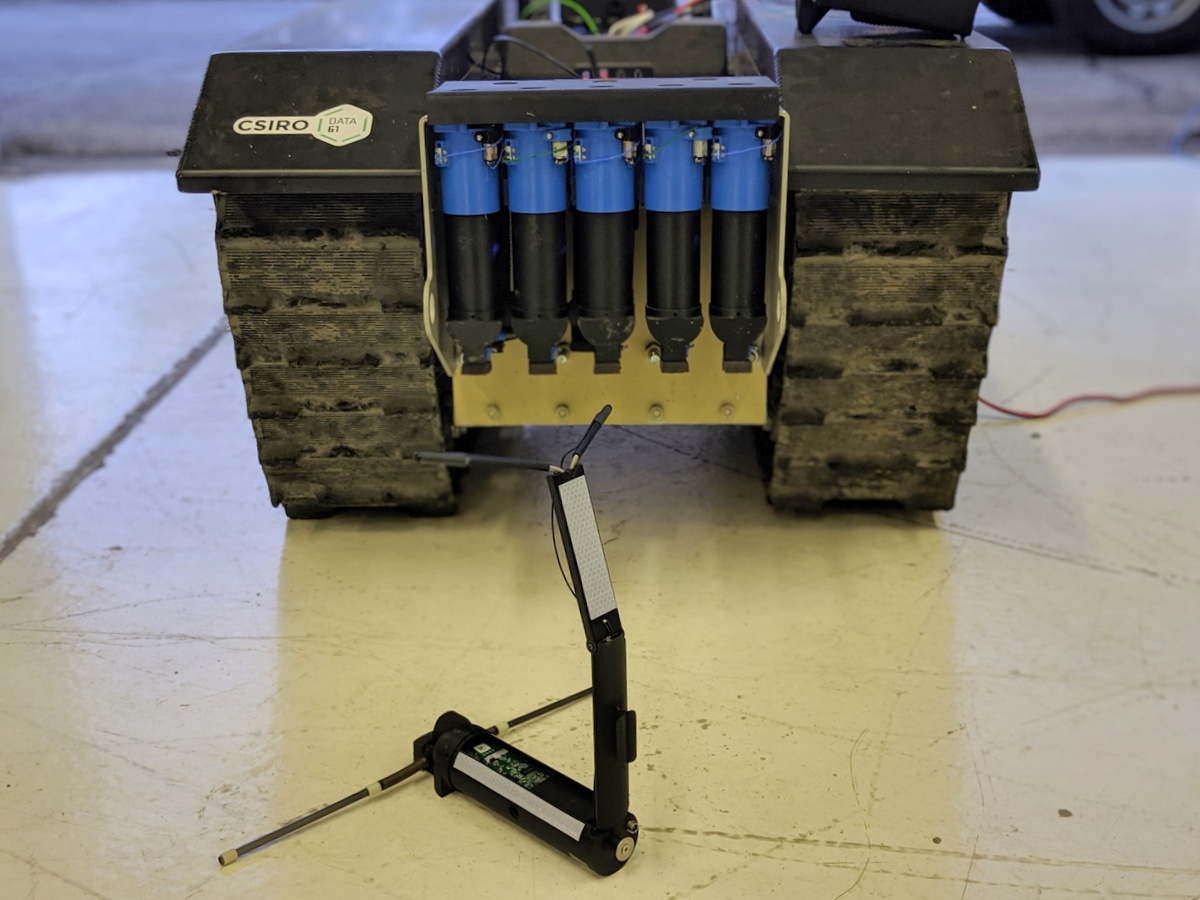
Это некоторые из наиболее удачно спроектированных сетевых узлов, которые мы когда-либо видели, — когда их отбрасывают, узел ждет несколько секунд, пока робот не отвлечется, а затем использует привод и пружины, чтобы перевернуться и развернуть свои антенны. , Отражающие поверхности также приятны на ощупь; по-видимому, они помогают DARPA находить отброшенные узлы в конце цикла, а также поощряют любых последующих роботов не перебегать через них.
Командный КРИТИЗ

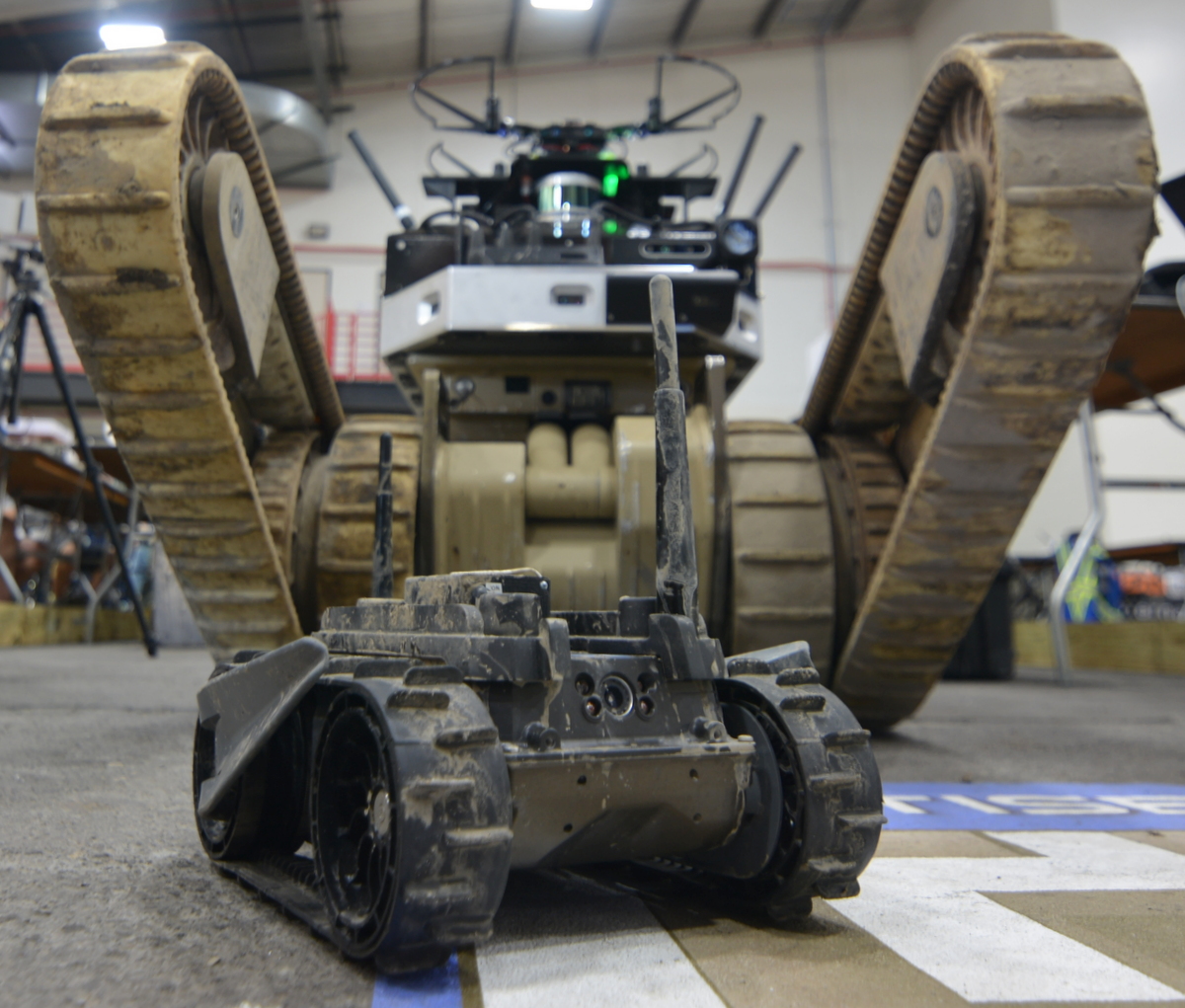
Зачем отбрасывать сетевой узел, который просто сидит там, если вместо этого вы можете отбросить сетевой узел, который может сам себя разъезжать? Команда CRETISE отбрасывает роботов FirstLook от чудовищного робота-носителя, чтобы служить маленькими симпатичными мобильными узлами, которые могут перемещаться для оптимизации вашей сети.
FirstLooks сами являются потомками LANdroids, которые были разработаны iRobot с финансированием DARPA так давно, что я писал о них еще до того, как писал о роботах, в начале 2007 года. Первоначально идея с LANdroids заключалась в том, что они будут самостоятельно развертываться в создавать динамичные и гибкие ячеистые сети в сложных условиях, но в итоге iRobot превратил их в роботов-наблюдателей FirstLook. И теперь, спустя более десяти лет, Team CRETISE снова превращает их в LANdroids, что довольно круто.
Команда МРАМОР
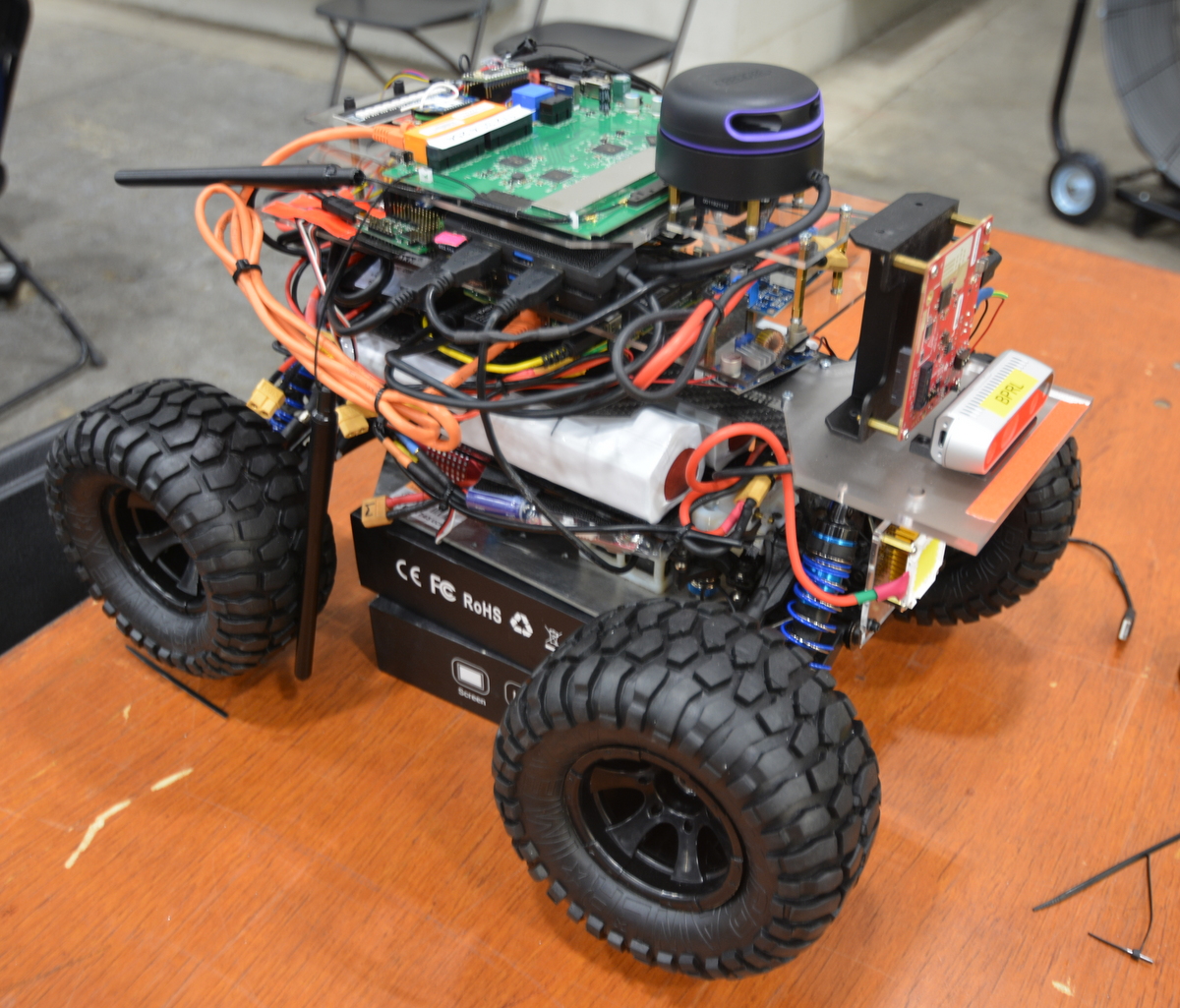
В дополнение к небольшим развертываемым узлам ячеистой сети в форме шайбы, команда MARBLE экспериментировала с этими роботами, построенными на внедорожных гоночных автомобилях с дистанционным управлением. Конечно, у них есть встроенные датчики, компьютеры и средства связи, но они не предназначены для поиска артефактов. Вместо этого их задача — доставлять информацию — быстро перемещаться между областями с подключением к базовой станции и другими (более медленными) роботами, которые исследуют в других местах.
Вместо того, чтобы выступать в качестве мобильных узлов, эти маленькие машины больше похожи на роботов доставки, собирающих данные и несущих их домой. Идея заключается в том, что без ограничений по обслуживанию сети роботы-разведчики смогут путешествовать намного дальше, в то же время проводя больше времени в самостоятельных исследованиях, полагаясь на автомобили, передающие информацию, для удовлетворения всех своих потребностей в связи. У команды еще не все работает, но это очень интересная идея, и мы с нетерпением ждем возможности увидеть ее в действии.