В качестве источника вдохновения водные существа, такие как рыбы, китообразные и медузы, могут вдохновить инновационные разработки, чтобы улучшить способы, которыми искусственные системы работают и взаимодействуют с водной средой. Медузы в природе продвигаются через окружающую среду, радиально расширяясь и сжимая свои колоколообразные тела, чтобы вытолкнуть воду позади них, что называется реактивным движителем.
Вопреки распространенному мнению, что медузы описываются как неэффективные пловцы, было доказано, что медузы являются одними из самых энергетически эффективных пловцов. То есть было показано, что плавание, подобное медузе, будет иметь замечательное преимущество в тяге, если требуется движение с низкой энергией. Поэтому движения медуз вызвали значительный интерес в последнее десятилетие в контексте подводных аппаратов с биодыханием.
Недавно исследователи из Института автоматизации Китайской академии наук в Пекине, Китай, успешно разработали новую роботизированную медузу, способную выполнять трехмерные движения и маневры, подобные медузам, на основе метода обучения с подкреплением.
Объединяя последние достижения в области мехатронного дизайна, материалов, электроники и методов управления, исследователи прилагают все усилия для разработки интеллектуальных приводов для изготовления различных роботизированных медуз. В общем, такие роботизированные медузы часто привязаны и имеют гораздо меньшую скорость по сравнению с типом, приводимым в действие обычными электродвигателями. Большинство существующих роботов-медуз не могут свободно регулировать свое трехосное положение, что отрицательно сказывается на движении свободного плавания и вероятных применениях.
Чтобы решить эту проблему, исследовательская группа во главе с профессором Цзюньчжи Ю из Института автоматики Китайской академии наук изучила, как спроектирована и управляется биотопливная роботизированная система, похожая на медузу, способная к трехмерному движению.
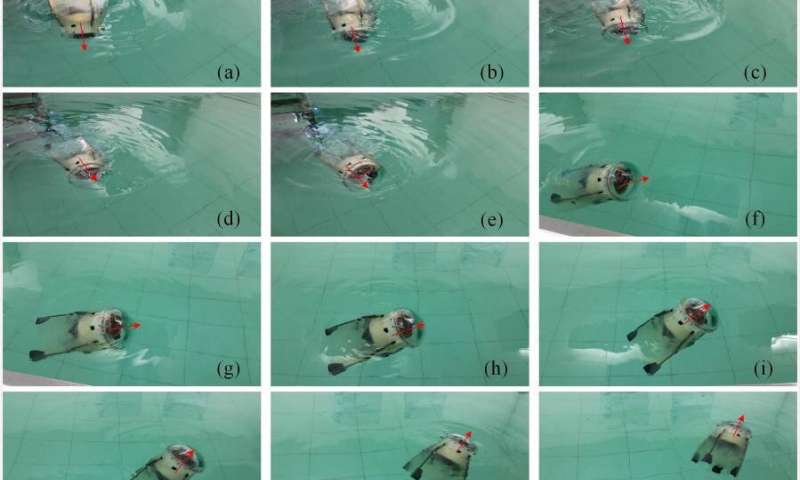
Разработанные роботизированные медузы созданы по образцу Aurelia aurita (обычно называемой лунной медузой), которая имеет относительно большое смещение и особенно подходит для использования с большой грузоподъемностью. Это около 138 мм в высоту и весит около 8,2 кг. Как показано на рисунке 1, роботизированная медуза имеет полусферическую форму и состоит из жесткой головки в форме колокола, цилиндрической основной полости, четырех отдельных шестиструбных механизмов сцепления и мягкой резиновой оболочки. Для повышения маневренности роботизированной медузы введен механизм регулировки барицентра, собранный внутри полости. Путем регулировки двух весов комков в вертикальном или горизонтальном направлении или в сочетании этих двух параметров достигается регулировка ориентации.
Медузы в природе используют реактивные двигатели для перемещения по воде, которые, как было доказано, являются одними из самых энергетически эффективных пловцов на планете. Поэтому движения медуз вызвали значительный интерес за последнее десятилетие в контексте подводного аппарата с биоинспирацией. Теперь исследователи в Пекине разработали новую роботизированную медузу, способную выполнять вертикальные и горизонтальные движения и маневры, подобные медузам. Предоставлено: © Science China Press.
«Очень трудно создать точную динамическую модель для плавания, подобного медузе, поскольку это очень нелинейная, сильная связь и изменяющаяся во времени система», — сказал профессор Юнжи Юй. «Параметрические неопределенности и внешние возмущения в динамических водных средах , в то же время, вызывают трудности при получении законов управления путем решения обратной задачи кинематики». Поэтому для робота-медузы предлагается метод управления ориентацией в замкнутом контуре, основанный на обучении с подкреплением, который может решить задачу оптимального управления принятием решений посредством прямого взаимодействия с окружающей средой, особенно без необходимости динамического моделирования.
Наконец, предложение основанного на обучении метода управления ориентацией делает возможным автономное регулирование ориентации. «По сравнению с большинством других роботов-медуз встроенный робот демонстрирует высокий порядок гибкости конструкции и маневренности рыскания», — подчеркивает Ю. Он также подчеркнул, что эта самоходная роботизированная медуза с трехмерным движением имеет большое значение для биоинспирированной конструкции реактивной тяги с большой маневренностью.