Робот, использованный в этом эксперименте, представлял собой машину марки Minitaur с ножками.
Фу, таракан! Но он отстает до появления мухобойки. Теперь, исследователи использовали превосходные навыки бега жучка, чтобы создать умно простой метод для оценки и улучшения передвижения роботов.
Обычно утомительное моделирование механики, электроники и информатики требуется, чтобы понять, как движущиеся части насекомых или роботов плавно координируются, чтобы занять их места. Но в новом исследовании исследователи биомеханики в Технологическом институте Джорджии сварили тараканов на удобные принципы и уравнения, которые они затем использовали, чтобы сделать тестового робота лучше.
Этот метод рассказал исследователям о том, как каждая нога действует сама по себе, как они все собираются вместе в целом, и о гармонии или отсутствии таковой в том, как они это делают. Несмотря на совершенно различную динамику движений жуков и ботов, новый метод работал для обоих и должен работать для других роботов и животных.
Биологический робот, плотва, был далеко впереди бегуна с неврологическими сигналами, управляющими шестью безупречно развитыми ногами. Механический робот, потребительская модель, имел четыре коротких ноги и не имел нервной системы, но вместо этого полагался на управление движением грубых физических сил, проходящих через его шасси, в качестве грубых сигналов для грубой координации его неуклюжей походки.
«Робот был гораздо громоздким и едва мог ощущать окружающую среду. У таракана было много чувств, и он мог лучше адаптироваться к пересеченной местности. Удары, достигающие высоты бедер, вообще не замедлили бы его», — сказал Изаак Невелн, первый автор исследования , который был докторантом в лаборатории Саймона Спонберга в Технологии Джорджии во время исследования.
Продвинутая простота
Метод, или «мера», как его называет исследование, превзошел эти огромные различия, которые пронизывают вдохновленную животным робототехнику.
«Эта мера является общей (универсальной) в том смысле, что она может использоваться независимо от того, являются ли сигналы нервными пиками, кинематикой, напряжениями или силами, и не зависит от конкретной взаимосвязи между сигналами», — пишут авторы исследования.
Независимо от того, как функционирует баг или бот, математические входы и выходы меры всегда находятся в одинаковых единицах. Эта мера не всегда устраняет необходимость в моделировании, но она позволяет сократить и направлять моделирование и предотвращать мучительные ошибки.
Авторы опубликовали исследование в журнале Nature Communications в августе 2019 года. Исследование финансировалось Национальным научным фондом. Спонберг — доцент в Физической школе Джорджии и в Школе биологических наук.
Централизация против децентрализации
Часто бот или животное посылают много сигналов ходьбы через центральную систему для согласования движений, но не все сигналы централизованы. Даже у людей, хотя передвижение сильно зависит от сигналов центральной нервной системы , некоторые нервные сигналы ограничиваются областями тела; это локализованные сигналы.
Некоторые насекомые, кажется, двигаются с небольшой централизацией — например, жуки-палки, также известные как трости, чьи ноги почти независимы. Клюшки — шаткие бегуны.
«Идея заключалась в том, что жуки-палки имеют более локализованный контроль движения, тогда как таракан идет очень быстро и нуждается в поддержании стабильности, а его управление движением, вероятно, более централизовано, более похоже на часы», — сказал Невельн.
Сильная централизация сигналов обычно лучше координирует локомоцию. Это может быть код, проходящий через сложную проводку робота, центральные нейроны таракана, синхронизирующие его ноги, или неуклюжее шасси робота, отклоняющееся от ноги, ударяющей о землю, таким образом, помещая вес на противоположную ногу. Роботисты должны видеть различия и выяснять взаимодействие локальных и центральных сигналов локомотора.
Классная физика
Новая «мера» делает это, сосредотачиваясь на всеобъемлющем явлении в ходячих ногах, которое можно рассматривать как маятник, движущийся вперед и назад. Для большого передвижения они должны синхронизироваться в так называемых колебаниях с фазовой связью.
Веселый, легкий эксперимент иллюстрирует этот принцип физики. Если несколько, скажем, шесть, метрономов — тиканье ритма, которое используют учителя фортепиано, колеблются не синхронно, и вы размещаете их все на платформе, которая свободно колеблется вместе с колебаниями метронома, колебания будут синхронизироваться в унисон.
Фазы или направления их колебаний связаны друг с другом посредством централизации их составных механических импульсов через платформу. Этот конкретный пример фазовой связи является механическим, но он также может быть вычислительным или неврологическим, как у плотвы.
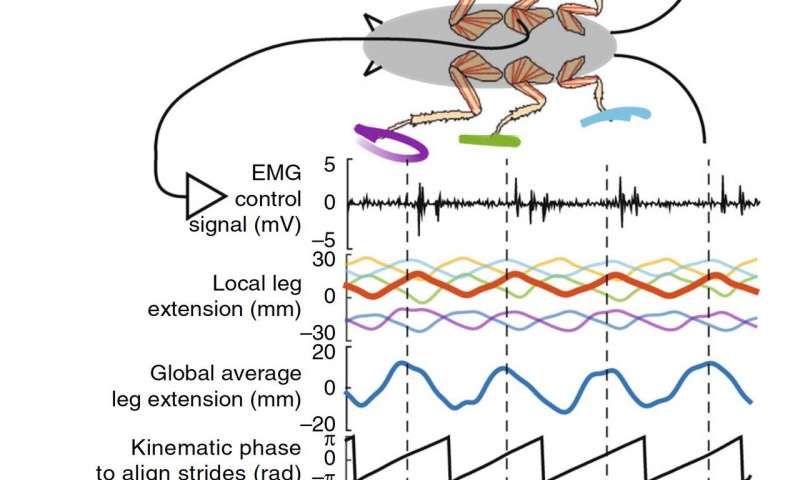
Его ноги были бы аналогичны колеблющимся метрономам, а центральная нервно-мышечная активность аналогична свободно качающейся платформе. В плотве не все шесть ног качаются в одном направлении.
«Их синхронизация неравномерна. Три ножки синхронизированы по фазе друг с другом — передние и задние ножки одной стороны со средним плечом другой стороны — и эти три синхронизированы по фазе с остальными тремя», — сказал Невельн. , «Это чередующаяся штативная походка. Один штатив из трех ножек чередуется с другим штативом из трех ножек».
Бесполезный pogoing
И точно так же, как маятник, колебания каждой ноги могут быть изображены как волна. Волны всех ног могут быть усреднены в общую волну бега плотвы, а затем превращены в более полезную математику, которая связывает централизацию с децентрализацией и такие факторы, как энтропия, которые могут отбросить контроль локомоции.
Получившиеся принципы и математика пошли на пользу неуклюжему роботу, который имеет сильные децентрализованные сигналы в двигателях ног, которые реагируют на контакт ног с землей, и централизованное управление слабее, чем у жучков. Исследователи также отразили движения робота, но они не привели к аккуратно синхронизированной группе волн, которые имел таракан.
Исследователи обратились с принципами и математикой к неуклюжему роботу, который изначально был не в своем роде — бесполезно подпрыгивал или прыгал, как палка пого. Затем ученые усилили централизованное управление, повторно взвесив его шасси, чтобы сделать его более согласованным.
«Метрономы на платформе представляют собой механическое соединение, и наш робот координирует управление таким образом», — сказал Невельн. «Вы можете изменить механическое сцепление робота, изменив его вес. Мы смогли предсказать изменения, которые произойдут, используя меру, которую мы разработали из таракана».
Таракан сюрпризы
Исследователи также подключили специфические мышцы плотвы и нейроны, чтобы наблюдать их синкопации с помощью волн бегущей волны. Семнадцать тараканов предприняли 2982 шага, чтобы проинформировать принципы и математику, и ошибки также вызвали сюрпризы для исследователей.
Один из них выделялся: ученые думали, что передача сигналов централизовалась больше, когда разгон ускорился, но вместо этого усилилась как центральная, так и локальная сигнализация, возможно, удвоив сообщение: «Беги!