
Festo, немецкая компания по электрической автоматизации, которая ранее принесла нам робота- стрекозу , кенгуру и пингвина , вернулась с парой новых творений — паук, который может катиться как колесо, и летучая мышь, которая летит на автопилоте.

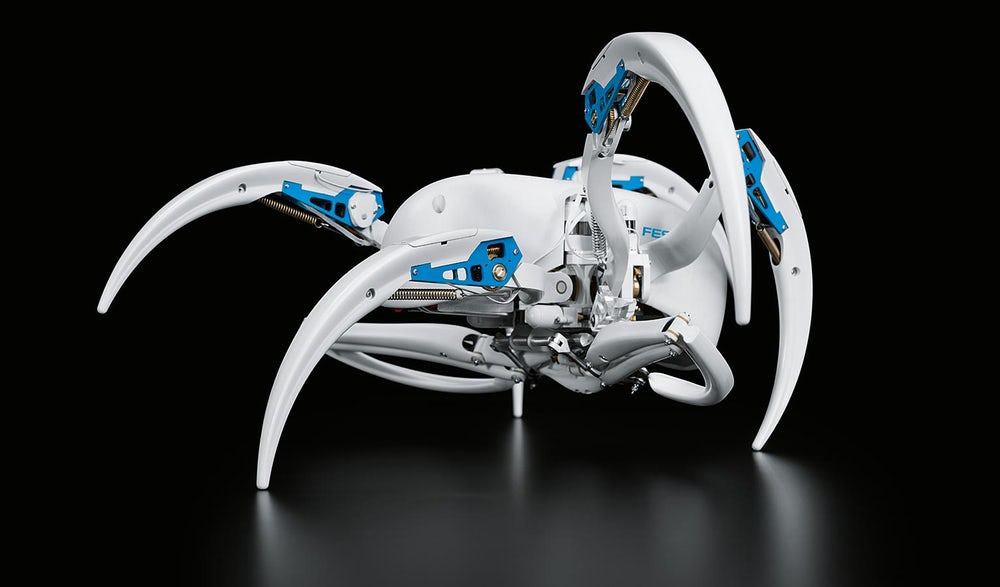
Напоминая о боевых дроидах Звездных войн, робот-паук BionicWheelBot был на самом деле вдохновлен пауком флик-флак ( cebrennus rechenbergi ). В его естественной среде обитания в пустыне Сахара этот паук обычно ходит по неровной поверхности, но катается / совершает сальто по ровной местности — это в два раза быстрее, чем при ходьбе.

Инго Рехенберг, профессор бионики в Техническом университете Берлина, впервые обнаружил паука в 2008 году. С тех пор он разработал различных роботов, которые используют его форму передвижения. В BionicWheelBot он сотрудничал с членами бионической команды Festo.
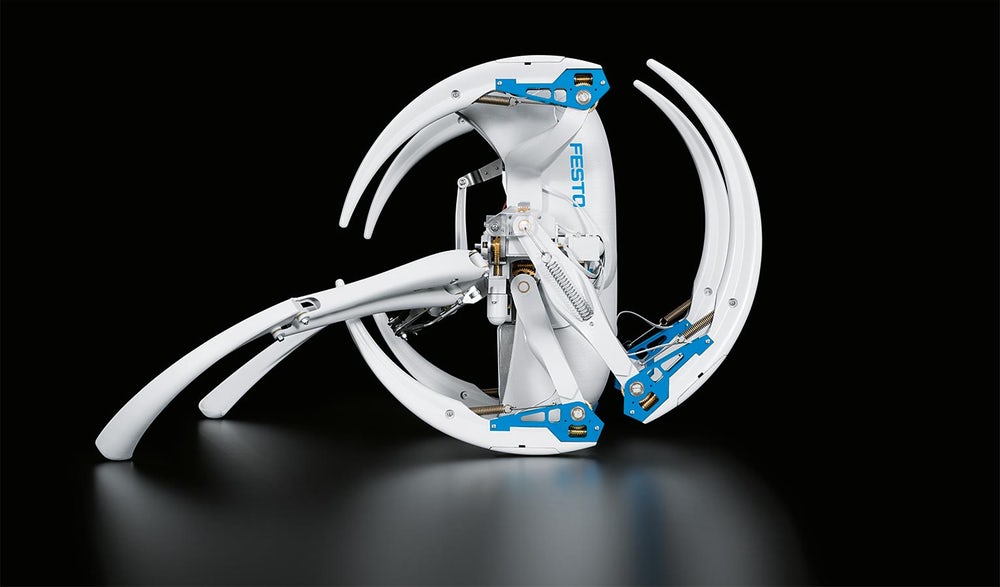
Робот, оснащенный 15 двигателями и управляемый дистанционно с помощью планшета, перемещается на шести своих подпружиненных ножках в режиме ходьбы, а остальные два сложены под его телом. Когда приходит время катиться, эти шесть ходячих ног складываются, превращаясь в два «колеса», в то время как две сложенные ранее ноги вытягиваются в любую сторону, чтобы толкать свернутого робота вперед — встроенный инерционный датчик позволяет ему знать, в каком положении он в, так что он знает, когда оттолкнуться снова.
В этой конфигурации, как и ее биологический аналог, BionicWheelBot может двигаться намного быстрее, чем при ходьбе.

BionicFlyingFox от Festo, как следует из названия, был вдохновлен летучей лисой (она же фруктовая летучая мышь). При весе всего 580 г (20,5 унций) робот имеет трехмерное фрезерованное пенопластовое тело и каркас из углеродного волокна.

Его крылья складываются независимо и покрыты одной непрерывной «тонкой пластиной» мембраной. Эта многослойная мембрана состоит из двух воздухонепроницаемых пленок и трикотажного эластанового полотна, которые спаяны друг с другом примерно в 45 000 точек. Ткань имеет сотовую структуру, которая предотвращает распространение мелких трещин, а это означает, что робот может летать даже при незначительном повреждении мембраны.
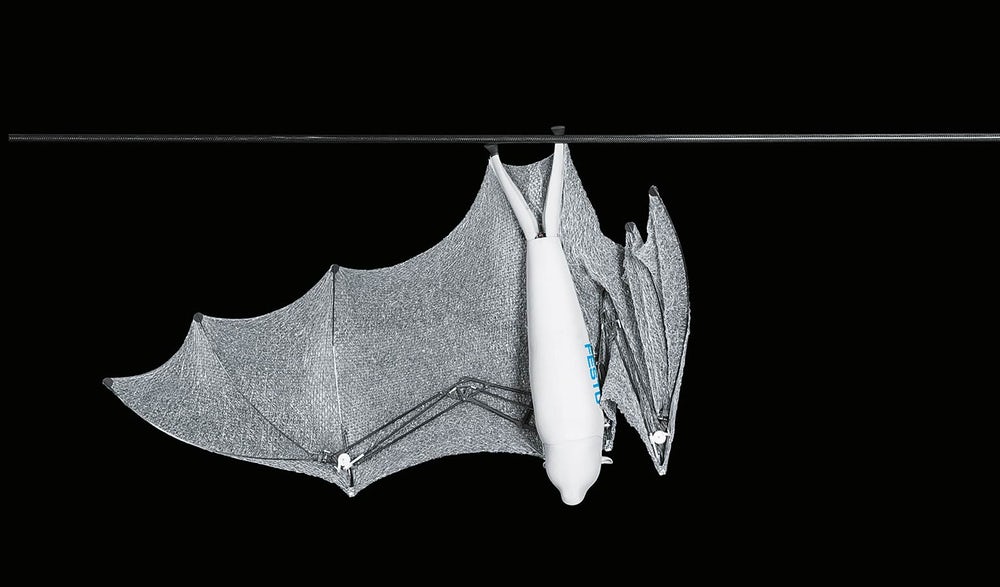
Человек-оператор вручную выполняет взлеты и посадки BionicFlyingFox с помощью пульта дистанционного управления. Пока он в полете, система автопилота вступает во владение. Это включает две наземные инфракрасные камеры, которые автоматически поворачиваются и наклоняются, следуя четырем инфракрасным светодиодам, расположенным на ногах и кончиках крыльев робота.

Изображения с камер отправляются на центральный главный компьютер, который, в свою очередь, действует как авиадиспетчер. На основе текущей ориентации робота и его расположения в пространстве полета компьютер планирует траекторию полета и передает команды в BionicFlyingFox. Движения крыла, необходимые для выполнения этих команд, рассчитываются самим роботом с использованием бортовой электроники.
Оба робота Festo можно увидеть в действии, в следующих двух видео.