Отправка чего-либо с поверхности Земли на поверхность Марса стоит колоссальных денег , и существуют жесткие ограничения на объем и массу, которые вы можете отправить в любой момент. Чтобы вместить максимум науки в минимальное пространство, НАСА пришлось проявить творческий подход, создав посадочные аппараты и марсоходы, которые должны быть легкими и складными .
В Лаборатории реактивного движения НАСА в Пасадене, штат Калифорния, инженеры долгое время пытались втиснуть как можно больше роботов в минимальное пространство, и команда робототехников недавно показала нам свое последнее творение: PUFFER, Pop- Вверх плоский складной робот-исследователь. Он разработан для того, чтобы упаковать его почти на плоскую поверхность для транспортировки, а затем снова развернуть на месте, чтобы исследовать все места, куда более крупный марсоход не может добраться.

Общая идея PUFFER заключается в том, что вы должны упаковать их вместе со следующим марсоходом и отправлять их всякий раз, когда вы хотите куда-то отправиться, что было бы рискованно или невозможно для большего марсохода. Может быть, это ползание по дюнам из глубокого песка, путешествие по крутым склонам кратера или исследование маленьких укромных уголков и трещин, куда не может поместиться более крупный вездеход.
Небольшой размер и вес PUFFER также открывают некоторые интересные возможности, если вы думаете об отправке более чем одного из них на задание одновременно. Потенциально их намного больше, чем один. Наличие доступа к небольшому рою PUFFER означает, что вы можете настроить роботов для взаимодействия друг с другом, возможно, даже до такой степени, что роботы оказывают друг другу физическую помощь, чтобы заниматься более всеобъемлющей наукой.
Одна из самых захватывающих вещей в PUFFER — это то, как он помогает перенести одни из самых крутых исследований робототехники, которые мы видели за последние несколько лет, в сферу практических приложений. В большинстве случаев, когда мы пишем о таких вещах, как роботы-оригами , лучшее, что мы можем сказать, — это то, что абстрактно они могут в какой-то момент пригодиться для оказания помощи при стихийных бедствиях, исследований или чего-то в этом роде. С PUFFER JPL делает следующий шаг, говоря: «Хорошо, как мы можем заставить эти технологии действительно делать что-то полезное в реальной среде, даже если этот реальный мир — это не Земля?»

Чтобы узнать больше о PUFFER, мы поговорили с Яакко Каррасом , менеджером проекта PUFFER в JPL.
IEEE Spectrum: Некоторые исследования, прямо или косвенно основанные на PUFFER, включают роботов-оригами, роботов, которые складываются, и роботов с хвостами. Какие еще роботы вдохновили дизайн PUFFER?
Яакко Каррас: Я был аспирантом в лаборатории биомиметических миллисистем [в Калифорнийском университете в Беркли] , и концепция PUFFER черпает вдохновение из этого исследования. PUFFER начался, когда я пришел в JPL и начал разрабатывать несколько ранних прототипов SCM [интеллектуальных композитных микроструктур] складных роботов. Я чувствовал, что эта технология находит хорошее применение в контексте НАСА, особенно в качестве вспомогательного средства для множества небольших планетоходов. Большая часть механической конструкции складного шасси PUFFER была выполнена в сотрудничестве с Роном Фирингом и его группой , поэтому многие темы их исследований также включены в PUFFER.
Способность PUFFER сплющиваться также похожа на роботов Дэвида Заррука , верно?
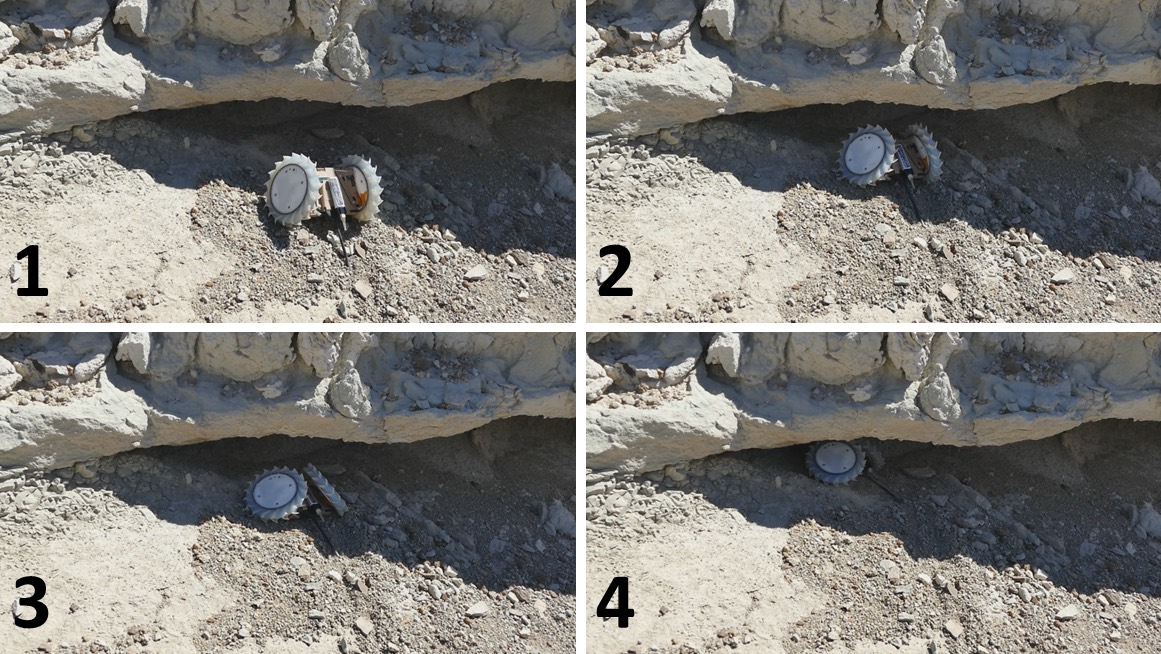
У меня был стол рядом с Дэвидом в течение нескольких лет, пока я работал в Беркли, поэтому я хорошо знаком с его работой над роботом STAR . Дэвид провел много очень хороших исследований в области мобильности с раздвинутыми колесами, и PUFFER определенно черпал вдохновение из его результатов. В частности, Дэвид продемонстрировал способность скользить под низкими зазорами над головой в раскинутой позе, и мы расширили это до доступа к областям под нависающими скалами на Марсе.
Было еще несколько роботов, которые используют складные компоненты, в том числе колеса . Может ли PUFFER стать еще более складным, чем сейчас?
Мы немного изучили исследование колеса оригами , и нам очень интересна концепция PUFFER! Мы даже сделали несколько ранних прототипов в этой области и надеемся интегрировать некоторые из этих проектов в будущем. Наличие развертываемых колес определенно сделало бы PUFFER более складным, как для большей компактности для интеграции в космический корабль, так и для повышения мобильности в ограниченном пространстве. Колеса в стиле оригами, вероятно, также улучшат устойчивость к ударам, поскольку колеса обычно являются первой точкой соприкосновения во время падений, а колеса оригами обеспечат отличную податливость с точки зрения поглощения энергии.
Какие компромиссы существуют с точки зрения надежности и долговечности, когда вы делаете робота складным?
Складные конструкции приносят как преимущества, так и проблемы, когда речь идет о надежности и долговечности. В случае PUFFER складывающееся шасси обладает большой гибкостью и податливостью, что позволяет нам выдерживать удары. Мы проехали PUFFER по уступам высотой 1 метр, успешно выдерживая падения на землю и даже на бетон. Мы также продемонстрировали выживаемость при падении с почти вертикальной 10-футовой скалы. Группа в Беркли продемонстрировала своих роботов-оригами на ногах, которые выжили при падении с вершины 10-этажного здания.
Одной из самых больших проблем с этими конструкциями, как правило, является долговечность изгибаемых петель, которые должны быть изготовлены из тонких гибких материалов. Мы часто видим в этих местах разрывы и трещины, вызванные усталостью. На PUFFER мы также пропускаем медные дорожки на шарниры изгиба, чтобы электрически соединить различные части шасси, и необходимо было принять меры предосторожности при проектировании, чтобы эти следы выдержали количество циклов складывания-разворачивания, которое мы ожидаем в течение срока службы PUFFER. . Одна из дизайнерских идей, которую мы придумали для PUFFER, заключалась в ламинировании действительно прочного Nomex.текстильный слой на жестко-гибкую печатную плату, а затем использовать его в качестве гибкого материала вместо традиционного полиимидного материала, который обычно используется для соединения жестких секций печатной платы. Текстиль Nomex чрезвычайно эластичен, что делает его отличным материалом для складывания изгибов, и он очень прочен на разрыв. Мы по-прежнему наносим наши медные дорожки на участки полиимидной пленки, но, поскольку они больше не должны обеспечивать функцию механического шарнира, они могут быть довольно длинными для более плавного радиуса изгиба и длительного срока службы меди.
Похоже, размер PUFFER еще не определен. Можете ли вы рассказать о соображениях, которые необходимо учитывать при принятии решения о том, делать роботов больше или меньше?
Размер PUFFER можно увеличивать или уменьшать, в зависимости от конкретной концепции миссии. Причины для расширения могут включать в себя желание разместить более крупные инструменты (или больше инструментов на платформе), больше батарей и площади солнечных панелей для большего бюджета мощности или, возможно, для более крупных колес и дорожного просвета для мобильности на пересеченной местности. Конечно, миссия может также захотеть уменьшить PUFFER. Причины для этого могут включать желание упаковать больше единиц в ограниченный объем полезной нагрузки, например, на очень маленьком посадочном модуле. Хорошая новость заключается в том, что жестко-гибкое шасси для печатной платы довольно легко масштабируется для соответствия широкому диапазону сценариев.
Как рой роботов PUFFER будет более эффективно заниматься наукой, чем несколько роботов PUFFER, работающих независимо?
Есть ряд сценариев миссий, в которых совместное расследование было бы полезно. Одним из примеров может быть ситуация, когда вы хотите попасть в действительно неблагоприятную местность, такую как крутой обрыв, что выходит за рамки возможностей PUFFER, ведущих самостоятельно. Здесь ПУФЕРЫ могли вместо этого соединяться, как скалолазы, работающие в тандеме, и сообща подниматься по склону. Другой пример — попытка получить доступ к сети глубоких пещер. Независимые PUFFER быстро потеряли бы связь с головным космическим кораблем. Однако, работая вместе, несколько PUFFER могут действовать как цепочка повторителей для ретрансляции данных из пещеры.

Можете ли вы описать гипотетический сценарий миссии роя роботов PUFFER?
Сценарий пещеры выше — хороший пример ситуации, когда PUFFER могут улучшить миссию, предоставив доступ к еще не исследованной наукоемкой цели. В этом сценарии более крупный «родительский» марсоход будет проехать в пределах, скажем, 50 метров от входа в пещеру (сохраняя само безопасное расстояние). Затем он выбрасывает несколько PUFFER из похожего на инструмент контейнера PUFFER, и они затем развертываются. Первоначально ПУФЕРЫ будут направляться в пещеру через камеры родительского вездехода, но как только они войдут в пещеру и зрение родителей станет неадекватным, они будут передавать изображения со своих собственных камер обратно родителю для обработки. Большая часть сложных вычислений автономии, вероятно, будет выполняться на более крупном и более мощном родительском ровере, при этом родительский компьютер отправляет команды по релейной цепочке PUFFER.
Какие виды местности являются сложными для PUFFER и как можно улучшить конструкцию или поведение робота, чтобы он мог работать на такой местности?
Из-за своего небольшого размера, PUFFER часто приходится объезжать препятствия, которые более крупный вездеход просто проехал бы. По сути, более низкий дорожный просвет PUFFER означает, что роботы должны быть немного более креативными в планировании пути при движении по очень неровной местности. С другой стороны, эта способность помещаться между препятствиями, такими как камни, — это то, что позволяет PUFFER проникать во все узкие укромные уголки и трещины, недоступные для более крупного марсохода, поэтому есть компромиссы. Расширяемые колеса оригами могут дать лучшее из обоих миров: колеса могут расширяться, чтобы преодолевать более крупные препятствия, и сжиматься, чтобы получить доступ к ограниченному пространству.
Конструкция колес и хвостового оперения, учитывающая особенности местности, может значительно повысить мобильность PUFFER. Текущие прототипы разрабатываются для типов местности на Марсе, и команда оптимизирует конструкцию колес для этих типов поверхностей. Недавно команда добавила микрошипы ( вдохновленные работой, проделанной с шипами для различных альпинистских роботов ) колесам PUFFER и увидела заметное улучшение характеристик наклона на своем аналоговом тестовом ландшафте Марса по сравнению с результатами, достигнутыми с более универсальными конструкциями колес. Поскольку PUFFER будут адаптированы для конкретных задач, имеет смысл оптимизировать характеристики мобильности для целевой местности.
Над чем ты работаешь дальше?
Теперь, когда у нас есть хороший прототип оборудования PUFFER, мы начинаем изучать программное обеспечение для автономной работы, которое позволит родительскому космическому кораблю отправлять и координировать их скопления. Мы только начали работать над автономией, но ясно, что есть много интересных проблем, которые нужно решить, особенно в отношении кооперативного поведения с несколькими PUFFER, которое мы надеемся развить.