В прошлом году Александр Кернбаум из SRI представил нам Abacus Drive, новый вид поворотной трансмиссии, основанной на чистом качении, которая обещает быть намного дешевле и намного более энергоэффективной, чем гармонические шестерни, которые являются текущим (и довольно дорогим) стандартом. Теперь Кернбаум вернулся с еще одной гениальной конструкцией трансмиссии с умным названием. Он называется Inception Drive, и он описывает его как «сверхкомпактную трансмиссию с бесступенчатым регулированием, основанную на новой конфигурации вложенных шкивов», предназначенную для того, чтобы роботы — и все другие вещи — более безопасны, доступнее и намного эффективнее. .
В бесступенчатой трансмиссии (IVT), которая представляет собой особый вид бесступенчатой трансмиссии , передаточное отношение включает нулевую точку, к которой можно подойти как с положительной, так и с отрицательной стороны. Другими словами, постоянный входной сигнал, такой как электродвигатель, вращающийся в одном направлении с той же скоростью, может быть преобразован в выходной сигнал, который вращается быстрее, вращается медленнее, вращается в противоположном направлении или вообще не вращается (в данном случае в нейтральном режиме, вам потребуется бесконечное число оборотов на входе, чтобы вызвать один оборот на выходе, отсюда и название «бесступенчатая трансмиссия»).
IVT уже существуют : концепция не нова. Новым в SRI является продуманная инженерия, благодаря которой Inception Drive на порядок меньше и легче существующих IVT. Это большое дело, потому что это означает, что IVT могут быть интегрированы в роботизированные приложения способом, который раньше был физически невозможен.
Причина, по которой такая передача важна для робототехники, в первую очередь связана с ее эффективностью, как объясняет Кернбаум в статье, представленной на ICRA ранее в этом году:
Эффективность роботизированной трансмиссии не превышает 50 процентов… Когда частота вращения на выходе часто изменяется, невозможно оптимизировать двигатель и систему передачи с фиксированным передаточным числом одновременно с точки зрения размера, производительности и эффективности: фиксированное передаточное число передачи приводит к значительным потерям в двигателе. Например, высококачественный электродвигатель может быть эффективен на 90 процентов при работе с высокой скоростью и низким крутящим моментом, но в роботизированных приложениях вместо этого система должна быть спроектирована так, чтобы обеспечивать необходимые пиковые крутящие моменты и скорости в минимально возможном корпусе, что приводит к система, которая почти никогда не работает с максимальной эффективностью.
Коробка передач с переменным передаточным числом может помочь согласовать скорость двигателя с его пиковым КПД или пиковой мощностью, но их размер, вес и сложность исторически исключали их использование в большинстве робототехнических и промышленных приложений. Именно здесь ключевую роль может сыграть сверхкомпактная бесступенчатая трансмиссия (IVT) SRI. Его небольшой размер, простота и реверсивный выход позволяют использовать несколько новых применений для трансмиссий с регулируемой скоростью. Он достаточно мал, чтобы заменить трансмиссии с фиксированным передаточным числом в роботах, где, как мы полагаем, он может вдвое снизить энергопотребление многих роботизированных платформ, удвоив время автономной работы мобильных платформ.
Если вы не совсем понимаете, как это работает, из видео (и даже Кернбаум признает, что это сложно визуализировать), прочтите объяснение, которое мы придумали ниже, а затем посмотрите видео еще раз и посмотрите, поможет ли оно.
Здесь происходит несколько очень важных вещей, которые очень трудно увидеть, потому что они происходят внутри самого диска . Во-первых, как два шкива взаимодействуют друг с другом. Это, конечно, происходит через клиновой ремень, но это не значит, что один шкив вращается, который вращает ремень, что заставляет другой шкив вращаться, как в обычной трансмиссии. Скорее, внешний шкив зафиксирован и вообще не вращается, в то время как внутренний шкив, который вставлен внутри привода, имеет колебания, так как он установлен не по центру относительно входного вала. (Название устройства — отсылка к фильму « Начало» , но с вложенными шкивами вместо снов.)
Поскольку входной вал заставляет внутренний шкив раскачиваться круговыми движениями, он постоянно снимает клиновой ремень с внешнего шкива при его движении наружу и снова опускает клиновой ремень, когда колебание идет внутрь. Если эффективные диаметры внутреннего и внешнего шкивов одинаковы, клиновой ремень будет просто перемещаться туда и обратно между двумя шкивами, и этого не произойдет. Но если эффективные диаметры внутреннего и внешнего шкивов различаются, клиновой ремень будет натягиваться в одном или другом направлении, поскольку он пытается удерживать два шкива соединенными. Поскольку внешний шкив не вращается, сила, оказываемая клиновым ремнем, заставляет вместо этого вращаться внутренний шкив, и это выходной сигнал трансмиссии.
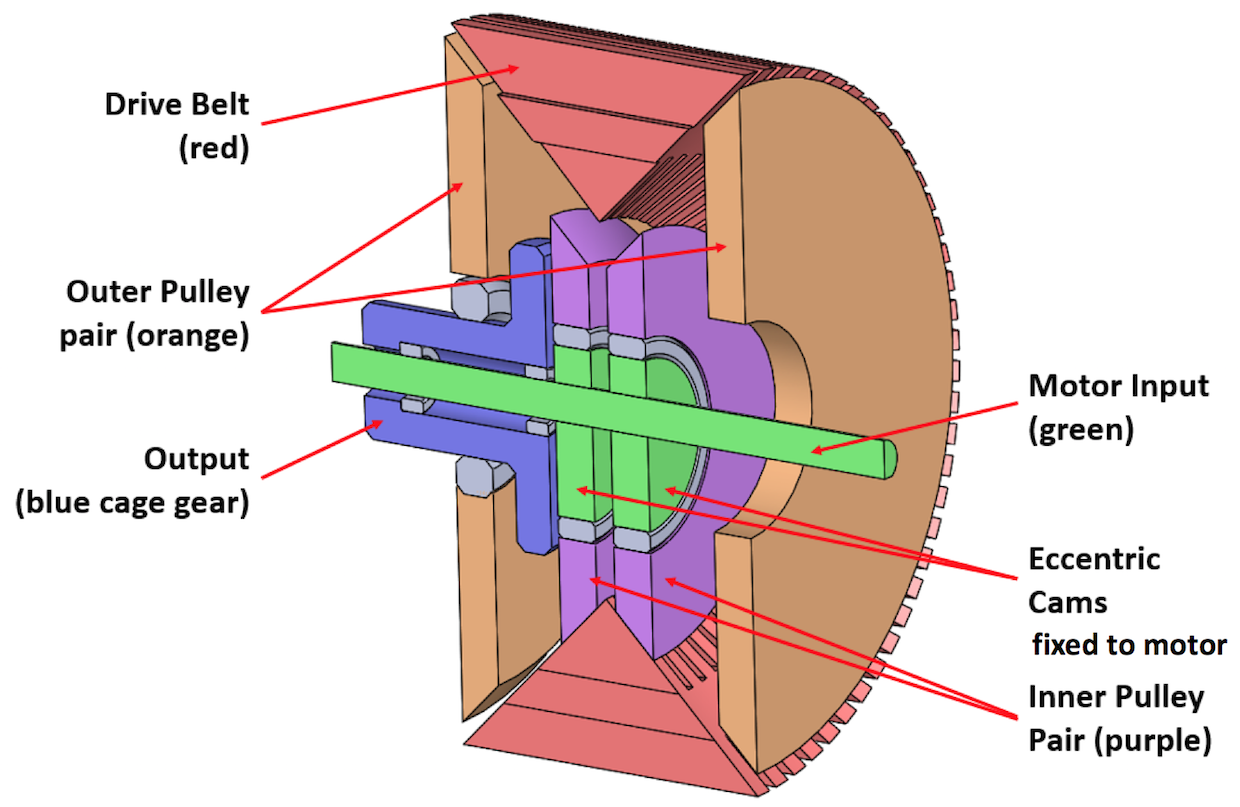
Во-вторых, как меняется передаточное число. Помните, что каждый шкив разделен на «пары шкивов», между которыми проходит клиновой ремень. Чтобы изменить передаточное отношение, одна пара шкивов отодвигается дальше друг от друга, в результате чего клиновой ремень углубляется в канавку между половинами шкива, в то время как другая пара шкивов перемещается ближе друг к другу, в результате чего клиновой ремень поднимается выше в канавке между половинками шкива.
Это изменяет эффективный диаметр шкивов — что касается клинового ремня, первый шкив просто стал меньше, а второй шкив просто стал больше, и это изменяет передаточное отношение. Если один шкив будет больше другого, то выход будет двигаться в одном направлении, в то время как переключение передаточного отношения приведет к движению выхода в другом направлении, и вы можете плавно изменять передаточное отношение до нуля, при этом шкивы одинаково эффективны. диаметр, и выход вообще не двигается (он находится в нейтральном режиме с редуктором).
Поскольку SRI, по сути, только что изобрели Inception Drive, они первыми признали, что «об этой передаче можно многое узнать». Например, хотя передаточное число не может быть изменено мгновенно, они уверены, что его можно изменить достаточно быстро для большинства роботизированных приложений. Также предстоит проделать большую работу по исследованию общей эффективности системы, а также ее долговечности, и следующее поколение прототипов поможет более полно оценить характеристики привода. Но пока они разбираются в вещах, вот некоторые стратегии управления, которые, по мнению авторов, могут заинтересовать робототехников:
- Управление усилием : приложите постоянное усилие к двигателю (или пружине) и определите выходное усилие, изменяя передаточное число;
- Управление скоростью: используйте наиболее эффективную скорость двигателя и определите выходную мощность, регулируя передаточное число;
- Управление потоком энергии: отслеживайте количество энергии, распределяемой по системе в любой момент времени, и перемещайте его, используя передаточное отношение и контроллер двигателя, чтобы оптимизировать эффективность или мощность;
- Контроль импеданса: поскольку коэффициент передачи регулируется, импеданс системы можно настроить для оптимального взаимодействия с окружающей средой (отлично подходит для управления ударами и факторами безопасности человека).