Как правило, глубоководная робототехника не является областью, в которой мы ожидаем увидеть много значительных инноваций. Когда мы пишем о погружных роботах , они обычно ограничиваются очень близкими к поверхности работами. Это не полная неожиданность: похоже, что единственные люди, которые действительно беспокоятся о том, что происходит в глубоком океане (имеется в виду сотни или тысячи метров под поверхностью), — это военные, иногда ученые и нефтегазовая промышленность. . Роботы важны для этих людей, в некоторых случаях даже критичны, но технология оставалась более или менее застойной на протяжении десятилетий, поэтому мы не пишем об этом очень часто.
Честно говоря, есть несколько очень веских причин, по которым сложно внедрять инновации, когда дело доходит до подводной робототехники. Окружающая среда враждебна, поддержка удалена, а общение затруднено. Похоже на любую другую среду, где в последнее время было много разработок робототехники? Конечно, есть: пространство .
Houston Mechatronics Inc. , робототехнический стартап, базирующийся (как вы уже догадались) в Хьюстоне, штат Техас, только что объявил о впечатляющем раунде финансирования серии B. Возможно, вы не знакомы с самой Houston Mechatronics, но вы почти наверняка знакомы с некоторыми из их предыдущих работ: HMI был основан в 2014 году командой робототехников из Космического центра Джонсона НАСА, в которую входил технический директор Ник Рэдфорд, который был главным инженером проект Робонавт и возглавил группу, которая разработала Valkyrie .
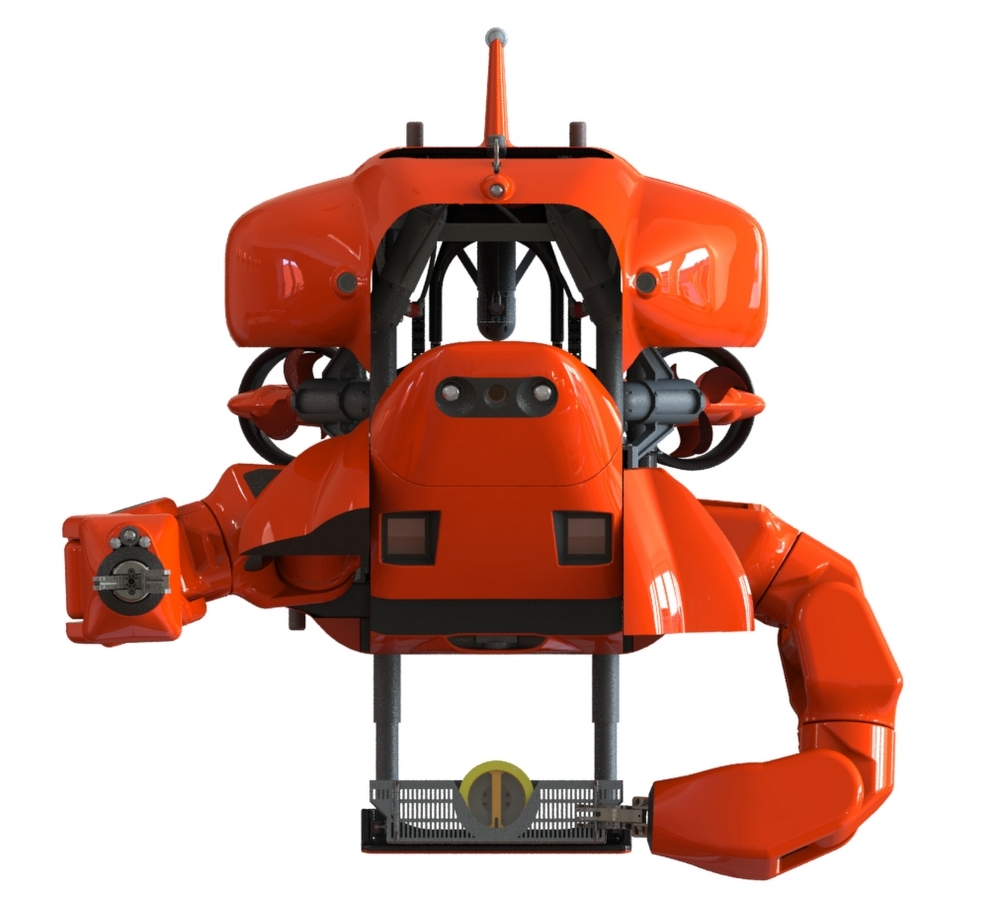
Компания HMI нацелена на свой десятилетний опыт в области робототехники (среди прочего) нового поколения беспилотных подводных транспортных средств с минимальным контролем (БПА), которые могут выполнять сложные манипуляции на глубине до 3000 метров без необходимости использования вспомогательных судов. Робот HMI, получивший название Aquanaut, будет путешествовать в подводном режиме к своему глубоководному месту назначения, где он развернется в своего рода гуманоидное туловище с руками и головой (!) И будет использовать гибрид дистанционного управления и вспомогательной автономии для выполнения своей работы. сделано перед автономным возвращением домой.
Если вы хотите работать на значительной глубине в океане, устоявшийся подход заключается в том, чтобы отправить вниз дистанционно управляемый аппарат (ROV) — квадратную миниатюрную подводную лодку с несколькими двигателями и манипуляторами. У ТПА мало или совсем нет автономии, и они должны быть привязаны к поверхности для питания и контроля, а это означает, что вам также необходимо отправить большое судно поддержки, набитое высококвалифицированными людьми, туда, где вы хотите выполнять какую-либо работу. Это очень быстро становится очень дорогим, но все так и было сделано. А поскольку ROV работают в отрасли, в которой доминируют несколько гигантских компаний с огромными суммами денег, стимул к поиску способов делать вещи дешевле или эффективнее не был таким уж большим.

Houston Mechatronics хочет разрушить это пространство с помощью UUV, который разработан с нуля (или это с волны вниз?), Чтобы работать некоторыми принципиально другими способами, чем существующие ROV:
- Существующим ROV нужны большие вспомогательные суда для развертывания и эксплуатации. Акванавта можно высадить с небольшой лодки (или даже с автономного вертолета), а затем он сам плывет к месту назначения.
- Существующие ROV необходимо привязать к источнику питания. Aquanaut полностью электрический и имеет собственный источник питания с бортовыми батареями> 30 кВтч.
- Существующие ROV должны быть привязаны для человеческого контроля. Aquanaut осуществляет акустическую связь через воду, что накладывает серьезные ограничения на пропускную способность (в лучшем случае несколько десятков килобайт в секунду). Чтобы компенсировать это, Aquanaut будет включать в себя сложную автономию, которая является совершенно новой для БПА.
Мы считаем, что из этих дифференциаторов последний является как наиболее революционным, так и наиболее технически сложным. HMI предлагает использовать Aquanaut в среде, где ухудшенная связь (например, роботы, испытанные во время финала DARPA Robotics Challenge Finals ) являются нормальным состоянием работы. И, как и в случае с DRC, потребуется некоторая степень автономии, будь то полная автономия или вспомогательная автономия с человеком в контуре.
«Один из конкретных навыков, который мы развили в НАСА, был основан на этой важной концепции: ловкие мобильные манипуляции в действительно дрянной среде общения», — говорит нам соучредитель HMI и технический директор Ник Рэдфорд. «В космическом полете связь с удаленными объектами, такими как роботы, может быть довольно прерывистой, медленной, скрытой и с потерями. Как и в случае с космосом, удаленное управление роботами под водой связано с серьезными неопределенностями в действиях робота. Следовательно, оптимизация передачи информации от оператора к роботу для выполнения действий и понимание роботом цели команды оператора имеют решающее значение. Затем робот может спланировать это действие, выполнить его и подтвердить свой успех оператору ».

На данный момент мы можем рассказать вам не так много о самом Aquanaut. Официально макет робота будет представлен на выставке AUVSI в Колорадо на следующей неделе , но мы видели фотографии его частей, включая рабочие руки и частичное тело. Aquanaut также примет участие в выставке ICRA в Австралии в следующем месяце , где мы, будем надеяться, сможем глубже изучить технические детали робота. А пока у нас есть дополнительная информация о самой Houston Mechatronics от Ника Рэдфорда.
IEEE Spectrum: Как началась Houston Mechatronics и как прошел переход от НАСА к стартапу робототехники?
Работа в НАСА была честью для меня и других сотрудников нашей компании, и это были одни из самых плодотворных лет в любой карьере, на которую можно надеяться. Разработка роботов для миссий НАСА дала нам возможность вооружиться навыками, которые, по нашему мнению, имеют огромную коммерческую ценность, и мы решили извлечь из этого выгоду. HMI был создан, когда мы решили, что не хотим сидеть в правительственной лаборатории и наблюдать за растущей революцией коммерческой робототехники со стороны.
Лично я нахожу переход воодушевляющим. Создание компании — это совсем другое дело, чем работа в государственной исследовательской лаборатории робототехники, но, вероятно, самая большая разница — это позиция риска: все стартапы связаны с огромными рисками для получения огромной прибыли. Есть что-то настолько приятное в том, чтобы взять на себя укоренившийся истеблишмент в отрасли, вызвать их и сказать: «Я знаю, что вы здесь какое-то время, но я думаю, что вы все делаете неправильно». Есть причина, по которой НАСА не запустило SpaceX; зачастую созданы организации не знают о каком — либо другом способе сделать то , что они делают, и это то , что так захватывающе о запуске новой компании- принимая риски. Что Хьюстон Мехатроника фокусировки прямо сейчас?
Благодаря некоторым проектам разработки робототехнических систем в сочетании с тщательным изучением рынка мы поняли, что эксплуатация подводных ROV на шельфе ужасно дорого, и что технология в этой области практически не развивалась с тех пор, как была представлена 30–40 лет назад. Итак, мы решили формально сразиться с гигантами в этой отрасли, модернизировав ROV с помощью технологии управления и контроля, вдохновленной НАСА.
Мы разрабатываем и строим революционного полностью электрического подводного робота под названием Aquanaut как для коммерческих целей в области энергетики, так и для инициатив, связанных с обороной. С коммерческой точки зрения, мы строим бизнес по принципу «робототехника как услуга» на основе эксплуатации Aquanaut для задач, которые в настоящее время выполняются с помощью ROV, прикрепленных к судам или буровым платформам. Что касается защиты, люди, которые выполняют «услуги», обычно носят камуфляж, поэтому мы с радостью просто продадим им наши технологии. Мы получаем поддержку от ВМФ и других людей из Министерства обороны, чтобы помочь в этом. И я упоминал, что Aquanaut также является подводным трансформатором? Это тоже есть.
Над какими еще областями робототехники работает Houston Mechatronics?
В первую очередь мы сосредоточены на создании Aquanaut и полного набора связанных продуктов (и на доказательстве того, что некоторые типы NASA могут не допускать попадания воды в роботов). Например, в рамках нашего подхода с чистым листом к перевороту в отраслях ROV и AUV мы разработали все электрические манипуляторы рабочего класса, которые теоретически могут быть применены на многих подводных платформах. У нас также есть наш пакет программного обеспечения для управления и контроля и технология электродвигателей, чтобы выделить еще несколько вещей.
Выше мы упоминали, что Houston Mechatronics была основана в 2014 году — вы, возможно, помните, что испытания DRC проходили в декабре 2013 года, и вы также можете вспомнить, что у Valkyrie дела шли не так хорошо. Намного позже мы выяснили некоторые причины этого , но похоже, что большая часть команды НАСА Валькирия (и Робонавт) решила отправиться делать свои собственные дела вскоре после испытаний в ДРК, и эта штука оказалась HMI — по словам Рэндфорда, около половины из 45 сотрудников HMI пришли из программ Valkyrie и Robonaut, что является огромным количеством опыта и таланта . Мы делали все возможное, чтобы следить за этими людьми на протяжении прошедших лет, и очень здорово, что они (наконец-то!) Могут поделиться тем, над чем они работали все это время.
Чтобы узнать больше об Aquanaut, обращайтесь к нам во время ICRA 2018 , которое будет проходить в Брисбене, Австралия, с 21 по 25 мая.