Роботы двигаются по-разному. Некоторые ходят ногами, другие катятся на колесах, а некоторые ползают по дорожкам. В какой-то момент, однако, они столкнутся с капризным ступенчатым препятствием, и RCTR от израильского университета имени Бен-Гуриона справится с этим.
Reconfigurable Continuous Track Robot (RCTR) — это практически весь трек, созданный в лаборатории биологического вдохновения и медицинской робототехники Дэвида Заррука в Университете имени Бен-Гуриона в Негеве. В прошлом эта лаборатория была ответственна за ряд новых движителей, в том числе одноходовую пилу, которая использовала волновое движение для ползания, плавания и лазания, беспилотный летательный аппарат, который мог летать и двигаться по земле, и бот, который двигался с трудом. Поверхности, такие как тротуар, с использованием круглых колес и колес с тремя спицами для борьбы с грязью.
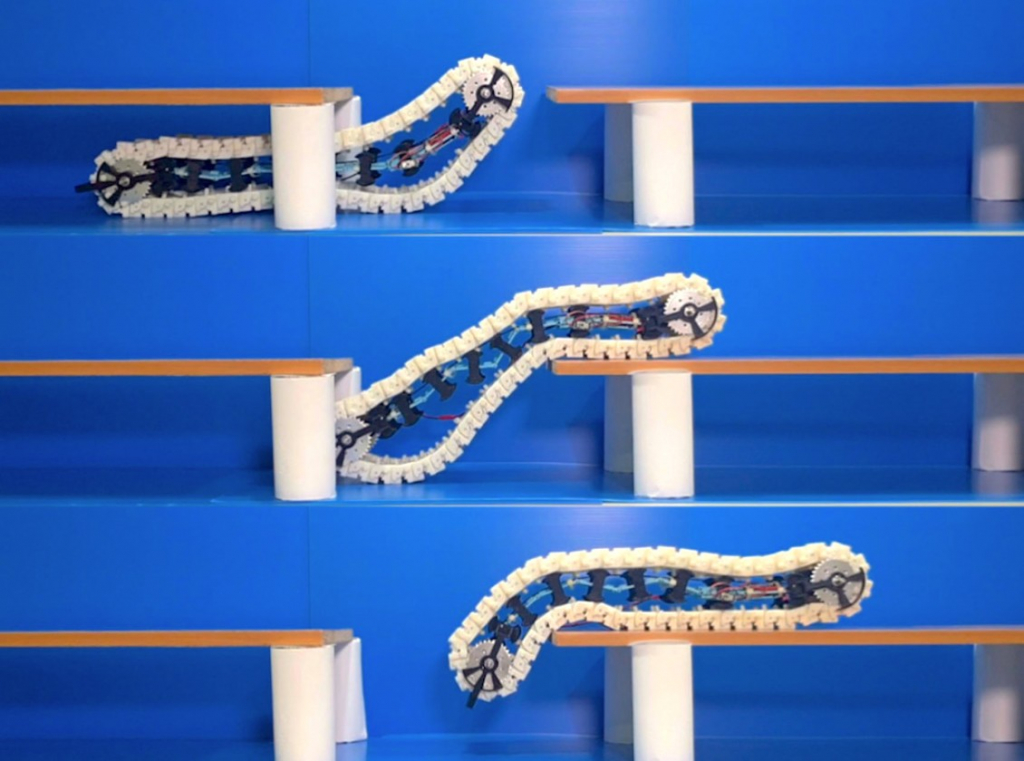
Команда Zarrouk снова решила пойти на минимальные для RCTR, используя три двигателя в текущем прототипе, но с целью сократить его до двух в будущем. По мере движения робота гибкие звенья, образующие непрерывно движущуюся дорожку, могут быть заблокированы на месте, чтобы гусеничный механизм оставался жестким или оставался разблокированным для гибкости. Если звенья заблокированы под углом, передний конец может подниматься вверх, чтобы встретить препятствия.
Как вы можете видеть на демонстрационном видео ниже, при смешивании заблокированных и разблокированных ссылок можно увидеть, как RCTR перепрыгивает через низкое препятствие, так что ни один из его треков не соприкасается с ним, не перекатывается по неровной местности, изгибая свое тело, и усиливается до преодолеть разрыв в дороге впереди.
Например, если этот вид бота был разработан для поиска и спасания, эта гибкость позволила бы ему обследовать места катастрофы без необходимости сбрасывать свой курс при столкновении с упавшей инфраструктурой или воронками и выбоинами.
Но, как указывает IEEE Spectrum , текущий прототип может двигаться только по прямым линиям, поэтому необходимо использовать какой-то механизм рулевого управления, прежде чем он выйдет из лаборатории и перейдет в реальные приложения. Было бы также полезно, если бы автономная технология пилотирования была включена в конструкцию, чтобы она могла делать свое дело без контроля оператора.
На данный момент RCTR остается в разработке. Документ о проекте был опубликован в IEEE Robotics and Automation Letters .